
質問に答えていて、セントラルステーションの使い方とかメルクリンの自動運転のやり方よりも、もっと前の段階として、デジタル鉄道模型や自動運転そのものに関する基礎的なところで引っかかっている質問が多いなと思ったので、現代のデジタル鉄道模型と自動運転についてよく誤解されがちだと思うことをまとめてみました。
本当はデジタル鉄道模型って何?というところから、基礎的な事を1つずつ段階的にまとめた方が良いんですが、それは今後動画のシリーズでやっていこうとも思っていますが、労力と時間がかかりますので、とりあえず今私がぱっと思いついたところだけをメモ書きしておきます。
これを書いている私のバックグラウンドについて
先に前提として、私のこと知らない人もいると思いますので、この話を書いている本人のバックグラウンドを書きます。
まず私のことをメルクリンマニアと思ってる人が多いんですけど、それは正しいんですが、鉄道模型に関しては、私はメルクリン以外も遊んでいます。
小学生の時にNゲージを買ってもらって、レイアウトとジオラマを作ったのが最初で、昔はWEBサイトとかでも紹介していたんですけれども、日本型の16番やDCC、On30みたいな、かなりマイナーなものまで、日本で発売されている鉄道模型はほぼ一通り遊んでるんじゃないかなと思います。
一応少しだけライブスチームとかもやったことがあります。
これまでに鉄道模型にかけたお金については、軽く1,000万は超えてると思うんですよね。



いろいろ遊んで、いろいろ体験した中で、私は鉄道模型を走らせたい、特に自動運転したいって思ってる人で、最終的にメルクリンが、その目的を実現するのに一番やりやすかったので、今遊んでいるのがメルクリンだということに過ぎないです。
また鉄道マニアでもあります。
鉄道マニアはいろんな種類がいるんですけど、私は乗り鉄と、鉄道のシステムの知識とか理解をするのが好きな人です。
乗り鉄はJR線(旧国鉄)を日本全線走破しています。
私鉄も西日本エリア(兵庫県よりも西)については、鉄道法で管轄されているものはすべて走破しています。
ヨーロッパの鉄道については、全然興味もなかったですし知らなかったんですけれども、ある程度の国は乗ったことがありますし、メルクリンを始めてからはメルクリンで関わったところは興味を持つようになって、徐々にいろんなことを調べたりしてきたので、今ではドイツ鉄道に関しては、車両の知識はそんなにないですけれども、運行とか運転については、シミュレーションゲームもやったりした結果、だいぶ理解が深まったかなと思っています。
なので、基本的に鉄道マニアの乗り鉄で、昔からいろんな列車に乗ってきていて、その思い出もあるので、家でも走らせたいな、博物館みたいな自動運転したいなって思ってる人が、この文章を書いていて、その視点から見ているということを、ちょっと意識しておいてください。
デジタル鉄道模型は簡単です
デジタル鉄道模型は日本にはありません
まずこの2点ですね。
日本においてはそもそもデジタル鉄道模型ってないんですよ。
日本のデジタル鉄道模型は遅れているとかそういうレベルではなくて、ないんです。ゼロです。
歴史的に言ったら、ヨーロッパは金属製の武器を使ってるけど、日本は魔法で戦うみたいな感じで、遅れてるとか進んでいるとか、どっちが優れているかとか、そういうことではなくもう別物です。
『ある』と『ない』ですから違う世界だってことですね。
ところが、鉄道模型そのものは日本にもあるんですね。
アナログの鉄道模型として、一番代表的なものはNゲージだと思うんですけど、かなり普及していて鉄道マニアなら知らない人はいないと思います。
アナログ鉄道模型はかなり普及しているのに、デジタル鉄道模型が全くないっていうことが、かなり話をややこしくしていて、誤解の大きな原因になっていると感じています。
『デジタル鉄道模型は難しい』みたいなイメージがあるんですけど、これは大間違いでめちゃくちゃ簡単です。
何がどれくらい簡単かって言うと、一番分かりやすいのは配線ですね。
例えば、スターターセットが売られているんですけれども、メルクリンと同じように、1つのエンドレスのオーバル線路と駅のところにポイント2個つけて、行き違いできるよっていう形のレイアウトを考えてみます。
これNゲージだとフィーダー線という線路への給電の電線以外に、ポイントへの給電線が2本必要になるんですね。それが最低限だと思います。
もちろんポイントは手動で動かすようにすれば、ポイントへの配線は要らないんですが、ここでは条件を揃えるために手動は考えないことにします。
これをデジタル鉄道模型で同じレイアウトを実現すると、フィーダー線が1本だけでいいんですね。
メルクリンで言えば、赤と茶(Bと0)の配線を、どこかに付ければいいだけで、それでポイントも電動で動くので、この時点でデジタルの方が簡単なんですよ。
このままの配線で、このレイアウトに列車を走行させる場合、アナログだと2列車になるんですね。
もちろんアナログでもデュアルキャブコントロールとかを使えば、もっと走らせられるんですけど、そうすると当然配線の数も増えますので、そういうことは除外すると、この配線での普通にできる運転を考えると、2列車になります。
一方で、デジタルは線路容量いっぱいまで、線路の上に機関車を埋め尽くしたとしても全部動かせますので、その点でもデジタルの方が走行台数が多くて、走行台数が増えても、1台のコントローラーで操作ができるという意味では簡単なんですよ。
しかし、これを言うと、日本の鉄道模型を遊んでいる人ほど、『いやいやCV設定しなきゃいけない』とか『アドレス管理しなきゃいけない』とか『設定や操作が難しい』とか言い始めるんですけど、それがまさにデジタル鉄道模型がない国だからの誤解なんですね。
例えば、メルクリンであれば現在のデコーダーはmfxなので自動認識なんですよ。
メルクリンやってる人で「CV値」なんて言葉知らないよって人たくさんいるはずだし、機関車のアドレスが何番なんかなんて知らない人も、山ほどいると思うんですね。
というか私も知らないですよ。
私のレイアウトには22台の機関車が載ってますけれども、それぞれアドレス何番なのかというのは1台も分からないですね。
レイアウトに乗せれば自動的に認識されて、コントローラーにその機関車が表示されるだけですから、アドレスを認識する必要はなくて、めちゃくちゃ簡単なんですよね。
機器や仕組みのことは、ほとんど知らなくても走らせることができます。
運転に関しては、アナログは勾配や電圧降下によって、速度を常にコントローラーで調整しなければなりません。
デジタルは指定した速度で走るように列車が勝手に調整するので、人間は1回速度を指示すれば、次の列車に操作に移れて、半自動的に走りますから、運転そのものが簡単です。
また、アナログの場合、上のレイアウトのNゲージで列車を動かそうとすると、そこへポイントを開通させないといけないです。
ということは、目で見て自分が走らせたい列車が今どこに止まっていて、そこへはどういう風にポイントがつながっていて、それが全部電気的に正しい方向に開通しているかどうかっていうことを、視認しないとそもそも動かないんですよ(ポイントが選択式のため)。
これは、アナログの人は無意識にやってることなので、それが簡単とか難しいとか全く意識してないと思うんですけれども、レイアウトが大きくなればなるほど意識しますし、操作も難しいですよ。
デジタルなら、列車を選択する→運転するの2手順で出来ることが、アナログだと、列車を選択する(コントローラー上で選びはしないがどの列車を走らせるかは確認が必要)→ポイントを確認して切り替える→運転するの3手順になるわけですから、手順が増えているという意味で、少なくともデジタルよりも簡単だとは言えないと思います。
おそらくデジタル鉄道模型でも、同じようにルートとか設定して走らせている人は、毎回あそこのヤードのあの列車を出すのに、あのポイント切り替えて……とか、操作大変だなって感じると思います。
そういうのは考えないといけないという意味で、難しいんですよ。
しかしデジタルなら、例えば私が使っている自動運転ソフトの『Rocrail』を使うと、そんなことは人間が考えなくていいんですね。
ヤードに止まっていようが、駅に止まっていようが、この列車をここの位置に動かすっていうふうに指示すると、途中にある信号機やポイントは、列車の進行に合わせて勝手に自動で切り替わっていくんですね。
つまり人間は操作は一切しないんですよ。
操作しないどころか、ポイントを切り替えないといけないってことすら、走らせる時にはまったく意識しなくていいんですね。
普通に考えてそっちの方が『簡単』という表現には合致していると思います。
他にも色々あるのですが、このように、デジタル鉄道模型の方が簡単なことが多いと感じています。
ではなぜ、『デジタル鉄道模型は難しい』と誤解されているかというと、まさに日本にデジタル鉄道模型がないからなんですね。
最新で本物の市販品のデジタル鉄道模型を見たことがない。遊んだことがないからです。
まず買ってくる段階で、じゃあ今からNゲージ始めるよって言ったら、それは簡単ですよ。
だってお店に行って、スターターセット売ってるからそれ買ってくればもうそのまま組み立てるだけで、走るじゃないですか。
デジタル鉄道模型も『ヨーロッパでは』まったく同じ状態なんですね。
お店に行くと、デジタルスターターセットを売ってるので、それを買ってきて組み立てるだけなんですよ。
その組み立てる時に、組み立て方が、もうデジタルの方が簡単なんですよね。


先ほど書いたように、配線の数が少ないです。
ヨーロッパの線路も十分にしっかりしていて、多少乱暴に扱えて、カチッと組み上がる。
これはメルクリンのCトラックじゃなくても、Rocoのレールでもフライシュマンのレールでも道床がついてるやつはしっかりしてると思います。
もちろん日本のKATOのユニトラックなんかも人気がありますが。
列車走らせるよってなると、メルクリンは先ほどのように自動認識なんですね。
では、DCCはどうかっていうと、DCCもスターターセットの段階では1列車なので、乗せれば走るんですよ。
2列車目を買ってきた時は、確かに、最初に1回だけ、アドレスの設定をしないといけないという作業はあります。
ただそれは、CVがどうとか複雑なことを考えなくても、ヨーロッパのコントローラーってほとんどスマートフォンみたいになっていて、というかDCCの場合スマートフォンがそのままコントローラーになるケースもあって、まさにスマホの画面に『この機関車何番にしますか?』って電卓の入力画面みたいのが出るだけなので、誰でもできるんですよね。
それがCV値だっていうことは、知識としてはあるんですけれども、そんなことを意識して覚えなくても、ただここに重複しない数字を、初回1回だけ入力すればいいっていうだけのことなんですよ。
ぶっちゃけ、Nゲージに付いているいろいろな細かいパーツやシールを取り付けるよりも簡単で、スキルも要らないです。
Nゲージだって、ヨーロッパなら、普通にデジタルのスターターセットが売っています。
Nゲージでも、ヨーロッパなら、線路に載せるだけでサウンドが出て、照明が点いて、ファンクションが使えて、同じ線路の上を複数の列車を走らせられるのは、ごく当たり前です。
Nゲージにアナログ鉄道模型しかないのは、日本だからです。ヨーロッパではNゲージもデジタルがあるのです。
ポイントの切り替えなんかもそうなっていて、例えば最近のコントローラーなんかであれば、レイアウトをスマホでカメラで撮影して、リアルに自分のレイアウトのポイントはここにこうなってるっていう撮った画像の上に、ポイントのスイッチコントローラーを付けられたりする製品もあります。
これは手元でこのポイントが何番とか考えなくても、見た目に自分のレイアウト写真の上で、このポイントで動かすって操作するわけだからめちゃくちゃ簡単なわけですよ。
それがヨーロッパでは当たり前。
でも日本ではデジタル鉄道模型を、ちゃんと総合的に製造・販売するメーカーがないんですよね。
アナログの代表的な比較例として、Nゲージを挙げましたが、Nゲージがだめだと言っているわけではないので、注意してください。
私もNゲージで遊んでいるので、NゲージにはNゲージの魅力があります。
メーカーがないという意味は、『自社製品の車両と線路とコントローラーをセットにしてデジタルスターターセットですっていうふうに売っているメーカーが1つもない』ということです。
例えばKATOがデコーダーは扱ってるよとか、DCCレディーだよみたいな車両はあるんですけど、それはあくまでもマニアで知ってる人が、パーツを買って自分で改造すれば走るよ、デジタル化できるよって意味であって、デジタル鉄道模型ではないんですよね。
なので言ってしまうと、日本型の車両でデジタルをするから難しいんですよ。
デジタル鉄道模型が難しいと日本の人が言ってる意味は、『アナログしか販売されていない日本型の車両を、自分でデジタル化しなければならないから難しい』という意味なんですね。
これは正しくて、その通りなんですけれど、だからといって『デジタル鉄道模型が難しい』ということにはならなくて全然違うので、そこが誤解されてるんだと思うのです。
デジタル鉄道模型で遊ぶのに、DCCとかメルクリンとかの知識は要らないですし、デコーダーがとかCV値がどうのこうのって、知識もほとんど要らなくて遊べます。
それは知りたくなってから覚えても全く問題ないし、ただ走らせて遊ぶだけなら覚えなくても問題もないことです。
なぜかって、今ほとんどのコントローラーもデコーダーも、メルクリンもDCCも共通ですからね。
そんなこと考えなくても、普通に説明書通りに組んで、画面タッチしたら走るんですよ。
私は鉄道好きで、鉄道模型も好きで走らせたいって、ずっと思ってたんですけど、最終的に自分で妥協したというか諦めたのは『日本型ではデジタルは無理だな』っていうことなんですね。
もちろんそれを乗り越えて遊んでらっしゃる方もたくさんいて、すごいなって純粋に感心はします。
でも僕のスキルと時間とお金では、日本型デジタルは無理だっていうことなんですよね。
これは非常に悲しいです。
でもメーカーが出してくれないんだからしょうがないよねって、もう割り切るしかないんですよね。
一方で、初めは海外型って全然興味なかったし、よくわからなかったんですけど、やっぱり遊んでいたら愛着もわきますし、それなり調べたりして、今やドイツの鉄道とかもかなり詳しくなって、そんなに多くないですけど実際に乗ったりもして、日本型とは別に結構楽しいなとなっています。
でも、心のどこかでやはり日本型でデジタルで遊びたいって気持ちは今でもあるんですよね。
だから自分の好きな車両については、頑張って改造して、1台か2台くらいは遊んでもいいかなとは思うんですけど、相当なマニアでないとそれもできないんですよ。
私ももう30年40年と、アナログの鉄道模型を含めていろんな鉄道模型遊んだことがあるんですよね。
メルクリンもマニアですし、自動運転もかなりのところまでいろんなことをやってみて、そこまで経験して初めて日本型のデジタル化にチャレンジしてもなんとか遊べるかな?っていう感覚なんですよ。
そういうレベルを要求されてるのに、そりゃちょっと新幹線に興味あるなって人が、日本型デジタルを始めるっていうのは無理なんですね。
だからこれからデジタル鉄道模型を始める人には、2つのことを知っておいてほしいです。
1つはデジタル鉄道模型は簡単であるということ。
もう1つは、ヨーロッパの鉄道でないと、デジタル鉄道模型では遊べないということですね。
自動運転はアナログ鉄道模型でも問題なくできる
次に自動運転に関しても、少し同じように逆の誤解があります。
それは『自動運転はデジタル鉄道模型でないとできない』と思われていることですね。
自動運転はアナログの鉄道模型でも全然問題なくできます。
それどころか走行させるパターンによっては、アナログ鉄道模型の方が簡単にできるよっていうパターンもあります。
実際に日本のアナログ鉄道模型であるNゲージでは、TOMIXからTCSやTNOSという自動運転システムが発売されていて、それで自動運転しているレイアウトがたくさんあります。
またロクハンという日本のZゲージがあるんですけれども、こちらも単純往復運転できる簡単な自動運転のユニットが発売されていて、実際に簡単に遊ぶことができます。
私の場合は、よくCS2、CS3を使っていますが、例えばTNOSの方が、CS3よりも簡単に複雑な運転ができるよっていう運転パターンもあるんですね。
特に、日本型の車両を、日本の鉄道と同じようなパターンで走行させようとしたら、そりゃ日本型に特化したNゲージの方がその動きを熟知していますので、TNOSの方が簡単なんですよ。
ここでちょっと、鉄道の事をあんまり知らない人はわからないかもしれないですけど、そもそも日本の鉄道とヨーロッパの鉄道は全く違いますので、列車の走らせ方(運行パターン)は、リアルの実車であっても、日本の列車の動きと、ヨーロッパ列車の動きは全く違うんですね。
なので、例えば日本型の車両を頑張ってデジタル化したとして、それをCS3やRocrailで走らせるよってなると結構難しいです。
なぜなら、鉄道運行の考え方や設備が全く違うからです。
単にエンドレスをぐるぐる走らせるだけの、言ったら実感的ではない動きなら、どちらも大差なく簡単にできますが、例えば、東海道新幹線を真似たい、高山本線を真似たい、地下鉄丸ノ内線を真似たいとなると、用語や設定の概念からして違うため難しくなってきます。
アナログのままNゲージのTNOSで走らせるのと比べると、日本型の運転なら、簡単さでは正直TNOSの圧勝だと思いますね。
自動運転をやりたいからデジタル鉄道模型を選択しなければならない、というものではないんですよ。
デジタル鉄道模型で自動運転をするメリット
じゃあデジタル鉄道模型で自動運転をするメリットって何なの?っていうと、私の個人的な感覚では3つあると思っています。
[1]線路の上に列車を限界まで乗せられること
たくさんの列車を線路の上に載せられるということです。
縦列駐車のイメージをしていただいてもいいですし、1つエンドレスのオーバルの上に、3個も4個も列車が続行して運転してるってイメージをしていただいてもいいと思います。
極論をすると、線路のスペースがある限り、車両で埋め尽くすことができるんですよ。
それができるということは、省スペース、要するに狭い場所しかないっていうところほど、デジタルが有利なんですね。
場所面積あたりに、列車を最大限詰められるから、小さなスペースでもたくさん走らせられるんですよ。
これはもう私のレイアウト見てもらったら分かると思うんですけど、アパートのロフトに、1.7m ✕ 2.2mぐらいのスペースしかなくても、ターンテーブルがあって、ヤードもあって、頭端式の駅もあって、行き違いできる駅が3つもあって、22台の列車が全自動で動くわけですよ。
この22台という数は、変な話ですけどメルクリンストアHRSのレイアウトや、そこらへんの博物館で走っている列車数も軽く凌駕してますからね。
それが、アパートのロフトの布団の横にあるわけですよ。いつでも遊べる。
これはデジタルのメリットですよね。
[2]さまざまなファンクションや照明やストラクチャーと連携した演出
単純にSLが煙を出すとか、警笛を鳴らすとか、駅のアナウンスが鳴るとか、鉄橋を渡ったら列車の走行音が変わるとか、それにプラスして、信号機がリアルの鉄道と同じように切り替わるとか、ストラクチャーの家や建物の照明が点くとか、他にもいろんなサウンドが鳴るとか、頑張れば時間に合わせて朝日から昼間、夕方の情景になって、夜景で綺麗なライティングができるとかね。
これはどちらかというとジオラマの要素が強いかもしれないですけども、これを統合的にすべてコントロールできるっていうのもデジタル鉄道模型の魅力だと思います。
アナログ鉄道模型の場合は、それぞれ個別に電気的な仕組みを作って、それを何かで統合しないといけないですね。
でも、デジタル鉄道模型なら統合型コントローラー(CS3のような)があれば、すべてそれで照明もサウンドもコントロールできるわけです。
これも私の動画でも確認できると思います。
[3]上記二つを統合して総合的に全自動でコントロールできること
つまり、鉄道だけでなく、鉄道含んだ世界観そのもの、町全体とか1つの地域とか国全体のすべてを、全自動運転というと変ですけれども、全自動操作で遊ぶことができるっていうことですね。
アナログ鉄道模型の場合には、自動運転はできるんですけど、それは鉄道で完結してるんですよね。
例えば鉄橋があった時に、その鉄橋に差し掛かったら列車が汽笛を鳴らすようみたいなこととか、出発前に駅でアナウンス流すよみたいなことをできるんですけど、じゃあそれを統合させてこの列車が来たらこれで、この列車がここに来たら時はこういうアクションするみたいなのを、個別に列車の特性に合わせた演出をしようと思うと大変なんですよ。
できなくはないですが、それはそれで別にサウンドシステムや照明システムみたいなものを用意して、それと運行システム連携させていかないといけないですね。
アナログ用の1つのコントローラーできないんですし、配線も大変になります。
デジタル鉄道模型であれば、CS3やZ21などのコントローラーと自動運転ソフトなどを組み合わせて、全部まとめて管理ができる点がメリットですね。
自動運転をしたり列車を止めたりするのに信号機はいらない
ここから先はデジタル鉄道模型を前提とした話になります。
具体例としてはメルクリンで説明しますが、DCCであっても基本的には同じです。
現代のデジタル鉄道模型において、列車を止めるのに信号機は全く要らないです。
信号機が不要と言ってるわけではないので、ここだけ読んだり、抜き出したりすることなく、必ずこの記事を最後まですべて読んでください。
実際に、私の現在のレイアウトでは、信号機やブレーキモジュールは、一切使用していません。
信号機はストラクチャー(運行には関係なく灯火を実感的に点灯させて楽しむ情景)として設置しています。
普段動画で見ていただいている、すべての運転は、信号機やブレーキモジュールがなくてもできる。むしろ、ない方が安くて簡単にできる、ということです。
これは私の個人的な意見ではなくて、例えばRocrailという自動運転ソフトのマニュアルにもはっきり書かれていることなんですね。
ですので、デジタル鉄道模型においてはごく一般的な知識なんです。
『信号機で列車を止めることができる』これは正しいです。
しかし、『列車を止めるのに信号機が必要である』これは間違っています。
このことを理解するには、少し鉄道模型の歴史を知る必要があります。
まず、アナログ鉄道模型の時代は全てが電気工作的な仕組みだけで動いていますので、列車を自動で止めるには信号機が必要でした。
これはデジタルになっても初期の頃はそのままで、信号機の表示はデジタルの遠隔コントロールで切り替えられるんですけれども、信号機なしでは、コントローラーのみで自動で列車を止めることはできなかったのです。
ところが、現代のデジタル鉄道模型では、列車を止めるのに信号機は要らなくなっています。
初期の頃のデジタルと、現代のデジタル何が違うのかというと、コントローラーの性能・機能です。
メルクリンで言うと、CS2よりも前と、CS2以後に、境目があります。
CS2より前は、6021というコントローラーだったんですが(実際には初代CSがあるのですが何故かメルクリンではなかったことにされている黒歴史?)、このコントローラーまでは、コントローラー内にコンピューターのユーザーインターフェースと機能が入ってなかったんですね。
わかりやすいイメージで言うと、CS2より前は単なる機械で、CS2からはパソコンのようなコンピューターがコントローラーになっているということです。
だから、6021では、ボタンで機関車のアドレスを電卓みたいに入力して、それを操作することしかできなかったんですよ。
ところが、CS2以降のコントローラーっていうのは、コントローラーの中にCPUがしっかり入っていて、コントローラー側でいろいろな制御をしたり、列車の状態の判断をすることができるようになってるんですね。
列車の停車の機能部分だけを取り出すと、CS2より前のコントローラーでは、人間が列車を止めますっていう命令を送らないと止まらなかったのが、CS2以後のコントローラーでは、人間が操作しなくてもコントローラーが自動的に列車を止めることができるようになったんですね(シャトルトレイン、メモリー、イベント機能)。
だから、昔は、自動で(人間の操作に頼らずに)列車を止めるためには、コントローラー以外に、別に電気工作的な機器が必要で、それが信号機だったということです。
コントローラーの性能はもちろんパソコンやスマートフォンとはまだ差があるんですが、現代のCS3やZ21といったコントローラーは大雑把に言ってしまったら、もうパソコンの一種なんですね。
また、コントローラーをそのままWiFi経由で他のパソコンやスマートフォンとつなぐことができます。
これはどういうことかというと、鉄道模型専門の機器を買わなくても、一般のパソコンやスマートフォンをメインや追加の機器として利用できるってことです。
この段階で気がついた人もいるかもしれませんが、性能は鉄道模型のコントローラーよりもパソコンやスマートフォンの方が上ですから、制御とか考える作業はパソコンやスマートフォンにやらせたらいいじゃんっていうことが、できるようになっているのが現在のデジタル鉄道模型なんですよ。
運転も機器の操作も、今までの信号機が行っていた機能は、すべて上位互換でパソコンというかコンピューターのCPUができるようになってるんですね。
なので、今では、列車を止めるために信号機は要らないんですよ。
代わりに、センサーとコントローラーで、止めることができるのです。
センサーとコントローラーで列車を止めるのは、その方が、信号機で止めるよりもメリットが多いからです。
信号機を使ってしまうと、電気工作的な機器で止めるので場所が固定されるとか、編成の組み方に制限が出るとか、進行方向が決まってしまうとか、いくつか制約があるんですね。
ところが、コンピューターのプログラムで止めるのであれば、デジタル鉄道模型である以上すべての機関車にはデコーダーが搭載されているので、場所も止め方も自由自在なんですよ。
何段階に分けて実感的にゆっくりブレーキングして行くこともできますし、一回ブレーキしてから再加速させることもできますし、私の動画でやったみたいに、オーバーランしてしまってからアナウンス流して戻す、みたいな動作も自在にできるんですね。
ああいうのは信号機はできないです。
↓当該の運転をしている位置から再生されます。
それからレイアウトの規模が大きくなると、コストの問題も出てきます。
ぶっちゃけ信号機は高いんですね。
メルクリンの場合は、純正品だと1個1万円以上します。
ドイツの鉄道と同じように実感的に信号をつけていこうとすると、遠距離信号の中では1台で2万円以上するものもあるんですね。
それを駅やヤードの必要なところに全部つけると、もう軽くセントラルステーションとフィートバックモジュールとセンサーの価格を超えてしまうんですよ。
一方でセンサーは、こちらも動画で紹介しているように、センサーの反応を受けるフィードバックモジュールは、2万円まではしなくて、1台のS88で16個のセンサーまで検知できます。
センサーそのものはコンタクトレールであれば、自作もできるので、道具代プラスでちょっと考えたとしても、まあ1万円も見ておけば何個でも作れるわけですね。
つまり、値段だけで言えば、CS3を持っている人は、信号機を1つ付けるお金で、センサーなら16カ所付けられるんです。
CS3を持っていないのなら、信号機であれば10個分くらいになりますが、それだけ信号機を付けるとCS3も欲しくなります。
信号機のコスパが良いのは、MS2で運転していて、数個くらいの信号機で出来る単純な運転まで、という感じです。
実感的に止めようとしてブレーキモジュールとかをつけると、ブレーキモジュールの値段もかさみますし、進行方向が決まってしまうという問題もあります。
さらにいろんなことを複雑にやろうとすると、どんどんお金がかかっていくことになります。
またブレーキモジュールにも問題があります。
説明書の配線図を見ると、「max 16V AC」という記載がありますね。
これは外部に交流の16Vの電源を必要とするという意味です。
これほとんどの人は入手に苦労するはずなんです。普通に売ってないですから。
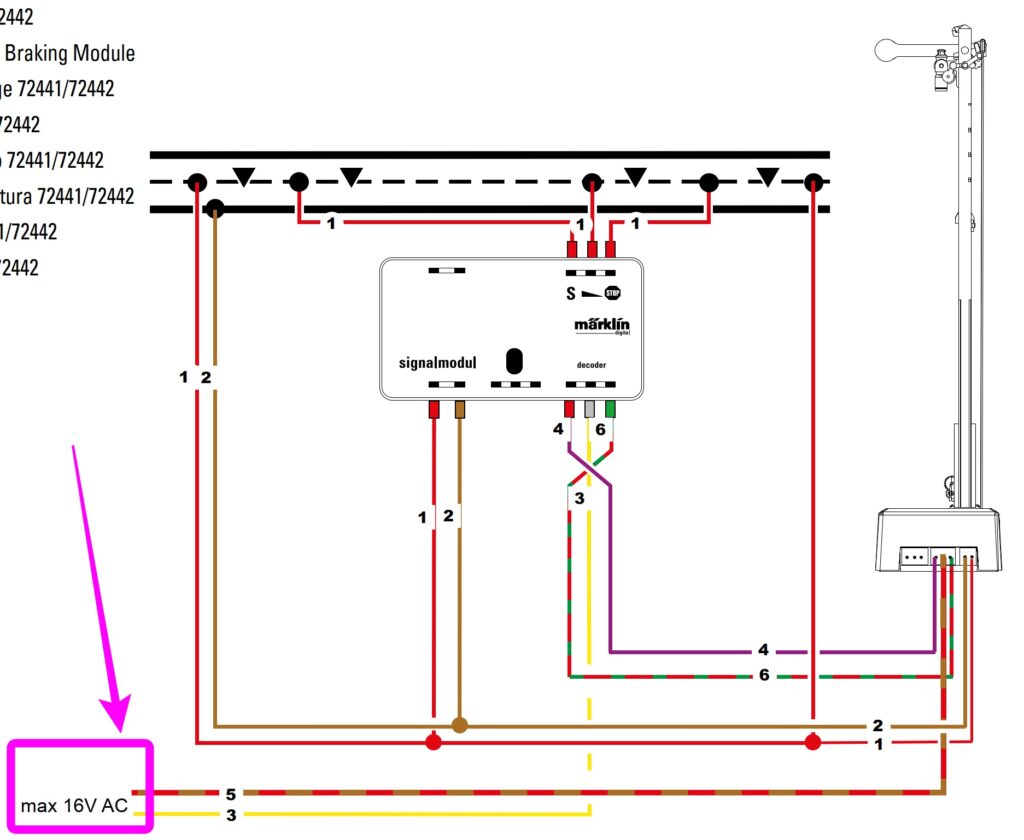
じゃあこれは何だと言うと、昔のメルクリンのアナログのコントローラーには、この線をつなげる端子が付いていて、そこに繋げと言っているのです。
※後述しますが、実際にメルクリン公式が動画でもそう説明しています。昔の機器を動画内で持ち出してきています。そして、コメントでも物議を醸しています。
どういうこと?
特に日本の人で持っている人は少ないと思いますし、いまは売っていない製品ですから、今から始める人には間違いなく大きなハードルとなります。
現実的なやり方としては、赤茶線(Bと0)も16V ACですので、そちらに接続しても動きはするのですが、メルクリン公式は『そうして良いとは一言も言っていません』
また、公式の動画のコメントでも、同様の質問がいくつかありますが、公式は一切無回答でスルーしています。
つまり、何かの理由があって、『できる。しても良い』とは言えない、ということだと、私は解釈しています。
私個人の考えでは、もうブレーキモジュールは過去の製品だと理解しています。
公式も今持っていて、昔から遊んでいる人は、互換性や故障した時の交換用品として売っているよ、でも今からブレーキモジュールを使う必要なんてないでしょというのが本音ではないかと推測しています。
少なくとも、CS3とセンサーがある人には不要で、むしろ昔作ったレイアウトで遊んでいるとか、そのまま活かしたいとか、MS2だけで自動運転をやってみたいという人には、信号機とブレーキモジュールが向いていると思います。
外部電源については、メルクリン公式は無視を決め込んでいますが、他の質問には回答しているものがあります。
その中には、その運転はブレーキモジュールではできないので、イベントで停車させてくださいといった回答もあります。
先頭が制御車の場合については、ブレーキモジュールを2カ所に付けろとか、非現実的な回答もあったりします。
これらのことからも、とてもユーザーフレンドリーとは思えませんし、推奨しているようにも思えません。やりたい人だけがやればいいこと、という位置づけの機器だと感じています。
それから鉄道マニアにとっては、もう一個別の問題があって、信号機で列車を止めるとドイツの本物の鉄道の信号の現示(信号の表示のこと)と比べて、実感的にならないってことなんですよ。
鉄道マニアにとっては、信号機をつけたら本物と同じように点灯させたいって思うのが普通だと思います。
信号機は赤にしないと列車が止まらないわけですが、実際のドイツの鉄道では、信号が赤でも機関車が動くことがあります。
例えば、主要な駅の信号機では、信号は赤の停止表示になっていても、下に入換信号機がついていて、それが許可を示していると、機関車は機回しや入換をしたりするんですよ。
これはヨーロッパの鉄道は、日本と違って機関車が引っ張っている列車が多いですから、日常的にどの駅でも普通に見られる光景で、ヨーロッパの鉄道マニアがやりたいことの1つのはずなんですよね。
でも信号機で止めていると、信号を青にしないと機関車は走れないので、その時点で本物と違うじゃんってなるんですよ。
しかも、入換の時の走行速度と、本線を走る時の走行速度は、通常違いますから、それも再現したい。
Youtubeの前面展望動画などを見ているとわかりますが、他にもいろいろあって、信号と列車の挙動は分離したい。特に、複雑な表示ができる信号機ほど、列車の挙動とは別に制御したいというシーンが見られると思います。
メルクリンはちゃんとこの問題は分かっていて、どうやって解決しているかっていうと信号機と別にもう1個デコーダー付けてくださいなんですね。
信号機以外にm83デコーダーを繋げろという説明をしています。
これの意味がまさに今書いたことを実現するためなんですね。
つまり、ブレーキモジュールで実際に列車を止めるための信号はm83デコーダーから出力して(信号機は光らない)、信号そのものの照明の光り方をコントロールするのは、信号機のデコーダーを使ってくださいなんですね。
実感的にやるにはデュアルデコーダーで使ってください、またはイベントを組んで止めてくださいっていうのがメルクリンの言いたいことなんですよ。
メルクリン公式の動画でも同じ説明をしているので、私が勝手に言ってるわけではないです。
メルクリンもちゃんとそういう意識をしていて説明しています。
※外部電源のコメントを含めて、下記の動画で説明されています。(5年前の動画です)
ここからは私個人の意見なんですけど、おそらくドイツの人も信号機にお金をかけてたくさんいろんな種類の信号機つける人は、鉄道マニアなんじゃないかなって思うんですよね。
私もそうですけど複雑な表示ができる信号機を買ったら、やっぱり本物通り光らせたいですし、そうなってくると、信号機の表示に列車の動きが連動しちゃうのは困るんですよね。
アナログ時代は許されたかもしれないんですけど、今デジタルになって様々なファンクションが搭載されていて、かなりリアルに近づいていて、アナウンスとかそういう機能もたくさん付くようになっているがゆえに、そこまでできるんだったらやっぱり音も動きも本物にしたいよねっていうことだと思います。
もちろん信号機で列車を止めちゃダメって意味ではなくて、特にドイツでは昔からのレイアウトをそのまま使っている人もかなり数が多いので、メルクリンも互換性を保つという意味でも今でも信号機には列車を止める機能が付いていますし、それを使ったレイアウトを作るのは全く問題ないんですけれども、ただ現代のデジタル鉄道模型では、必ずしもコストをかけて信号機をつけないと止まらないっていうことではないよってことは覚えておいてほしいです。
信号機のメリットとしては、来た列車が何でも止められるよっていうことがあると思っている人もいると思います。
電気的に止めるので、コントローラーから命令を出さなくても絶対に止まるっていう意味ですね。
これは確かにメリットなんですが、これもちょっと使い方の誤解があります。
詳しくは、次のセクションで説明しますが、単に来た列車を止めるよっていうだけであれば、別にセントラルステーションのプログラム(メモリーやイベント)でもできます。
そもそも来た列車を何でも止めたいんであれば、信号機すら要らなくて、m84で強制的に電気を切ってくださいっていうやり方も、普通にメルクリンは紹介しています。
また、イベントを組んでいて、同じイベントで列車を入れ替えて使うよっていう場合も、そんなに難しい操作ではないんですね。
具体的に言うと、列車の名前のところのプルダウンリストから、入れ替えて走らせてる列車に置き換えればいいだけなんですよ。
それで同じように動きます。
で、この時に、列車のファンクションとか汽笛を鳴らすとか、そういうのが変換しないじゃんって思ってる人は、ちょっとイベントの組み方が悪いんですね。
今のイベントは、イベントのコンテナの中に入っているアイコンに応じて機関車のファンクションが作動するようになっているんですね。
なので、汽笛を鳴らすってのは『ファンクションの何番を作動させる』っていうふうには動いていなくて、『汽笛の絵柄の付いたファンクションを作動させる』っていうふうに動くようになってるんですよ。
ここも時代の進化があって、ちょっと専門的な説明になってしまいますが、ファンクション番号を作動させるという書き方は、プログラムで行くと直値でアドレスを指定している状態なんですね。それはもう30年以上前のプログラムの組み方です。
今は当然変数というかラベル名とかプロパティ名で指定するのが当たり前なので、CS3はちょっと分かりにくいんですけども、Rocrailであれば、汽笛の機能には日本語で『汽笛』という名前を付けておくと、ファンクションボタンにも『汽笛』と表示されますし、『汽笛』を鳴らせとイベントに書けば、それがどんな機関車であっても必ず汽笛が鳴るんですね。
そう日本語でもいいんです。いまのプログラムはそうなっているんです。
なので、CS3であっても、機関車を買ってきてレイアウトに導入する前に、同じ動きをさせる同じファンクションを利用する機関車はすべてファンクションの絵柄を合わせておいてくださいね、が前提なんですよ。
買ってきた後に初期設定みたいなイメージをしてもらえばいいんですけれども、それは出来てる前提でイベントを組んでますよねってことになってるんです。
ちょっとわかりにくいという人はいるかもしれないですが、上に書いた内容は理解しなくても良いですが、少なくとも今はもうコンピューターの時代なので、デジタル鉄道模型であっても方向性は間違いなくそういう方向性、つまりコンピューターで列車を運転するという方向に進んでいます。
電気工作でも、もうIoTなんですよ。
私は電気工作を勉強しようかなと思って、電気工作が得意な人から入門書を紹介してもらって読んだんですけど、読んでびっくりしました。
電気のこととかその物理的なことが書いてあるのは、本の先頭1/5ぐらいしかないんですね。
残りは全部コンピュータープログラムの話なんですよ。
電気工作であっても、Googleアカウント取って、Googleドライブ(クラウドストレージ)と、Github(クラウドでプログラムを共有・管理するサービス)使えって書いてありますし、そもそも使うチップがArduinoとかいう小型のコンピューターなので、あとはもうプログラミングの話なんですよ。
実際に日本でも、DCCのコマンドステーション(デジタル鉄道模型を走らせる機能だけのコントローラーだと思ってください)を自作されている方とかもいらっしゃるんですが、チップを組んだら、あとはプログラムを書いて制御します。
そして、その制御用のCPUの処理能力で、列車の走りは明確に変わります。
高性能なCPUの方が、列車は滑らかにスムーズに走るのです。
つまり、デジタル鉄道模型の走行や運転の良し悪しは、単に列車のデコーダーやモーターだけで決まるのではないということです。
現代ではハードウェアの製作であっても、ソフトウェアの知識は不可欠で、何かを制御するのはほぼプログラム(ソフトウェア)で書かれているんですね。
これが良い悪いはもちろん議論はあるかもしれないんですが、少なくとも今そういう時代なので、ソフトウェアでものを動かすのはもう当たり前です。
それに全てソフトウェアで組んで動かす前提で機械が作られている以上は、ソフトウェアの知識は避けて通れないんですよ。
だから、学校教育でも情報という科目があって、プログラムを教えてるのだと思うんですけど、プログラミング的な発想、思考の仕方っていうのがわからないと、もう生活にも困るよねっていうことなんだと思うんですよね。
それはデジタル鉄道模型でも必須なんです。
で、このソフトウェアの部分も、コントローラーの機能というか性能の出来の良し悪しになっています。
これ言ってしまうとアレかもしれないですけど、CS3はこの部分の出来はそんなに良くないです。
CS3でイベントを組んでいるせいで若干やりにくいところがあるんですが、例えばRocrailなどの自動運転ソフトを使うとイベントはもっと簡単になりますし、1つのイベントをいくらでも使い回せるので、列車を交換したからイベント作り直さなきゃいけないってことは全くないんですね。
そういうイベント機能のめんどくささに関しては、単にCS3のその部分の機能やUIがへっぽこっていうだけの話で、デジタル鉄道模型でセンサーで列車を止めることが、面倒くさくて大変ということではないです。
前に書いたように、そのCS3には、無料でRocrailが接続できて拡張機器として使えるわけですから、CS3が使いにくいからRocrailでイベント作るよって選択をしても、パソコン代金を別とすれば無料なんですよ。
CS3の方が使いやすいところはCS3を使って、Rocrailの方が使いやすいところはRocrailを使うと、使い分けることもできます。
だから別にCS3だけにこだわる必要もないし、CS3を買ったから、他の機器を認めないってこともないんです。使いやすいように繋いで、使ったら良いんです。
今から始める人は、信号機は列車を止めることには使わない方が良いと、個人的には思っています。
では、信号機に列車を止める機能って、互換性を保つ以外に意味がないのか?っていうと、そうではないです。
別の使い方があるので、それを次に説明します。
信号機は列車を止めるのではなく列車を止めておくための保安設備
信号機の使い方とメリットは、列車を止めることではなくて、列車を止めておけることなんですね。
つまり、間違って発車しないように止めたままにしておくということです。
これは本来の信号機の目的そのものです。
鉄道の信号機と車の信号機って全然違うんですよ。
鉄道マニアでないと、鉄道の信号機の意味を理解してない人も多いんですけれど、鉄道の信号機っていうのは、青だから走れとかそういうことではないんですね。
保安設備の1つで、列車が事故らないように、指示を運転士さんに送るものなんです。
列車は車と違って急に止まれないんです。
だから、目で見て、反対から列車が来てるなって視認してからブレーキかけても、間に合わなくなっちゃうから保安設備が必要で、その1つが信号機なんですね。
ですので、列車の信号が赤ということは、走ったらダメだよという意味で、赤の信号を見て止まるのではないのです。赤信号で止まれるように走るのです。
余談ですが、この『赤信号で止まれるように走る』ために、信号機が出す指示の方法が、ドイツと日本では全然違うのです。
だから、自動運転の作り方も、信号機の光らせ方(使い方)も、ドイツと日本では全く違っているので、鉄道模型の仕組みもそれを理解して使わないと、難しいと感じる部分があるよってことです。
まあもちろん赤だったら止まるんですけども、赤に信号機がなってるところより先には絶対進めないような仕組みになってるんです。
車は信号無視できますが、列車は信号無視はできないんですよ。
仮に運転士が信号無視して発車しようとすると、他に連動している保安装置が列車にブレーキをかけるようになっています。
事故の時とかに、列車が非常ブレーキをかけて停車すると、なかなか発車しないのも同じです。
非常で止まったら簡単には発車できない仕組みになっています。
なぜ非常で止まったのか、本当に安全になったのか、1人だけではなく、関係者がお互いに確認してからでないと、運転士が走らせようとしても走れないんです。
これについては、本当に実感的なんですけど、メルクリンの信号機が赤で止まるよって意味もそれなんですね。
操作ミスであるとか、イベントだとプログラミングミスとかで、本当は走っちゃいけない列車が走り出してしまって、本線でぶつかるみたいな事故を経験したことがある人はいると思います。
信号機を赤にしておけば、仮に操作をミスったりプログラミングをミスって、列車が走り出しても本線に出て行く前に止められるんですよ。
これが現代のデジタル鉄道模型であっても、信号機をつけておく実用的な意味なのです。
物理的、電気的に事故を防ぐということです。
メルクリンの場合は、CS3くらいの機能・性能しかないコントローラーなら必要で、補助的にあったほうがいい設備だと思います。
ただRocrailのような自動運転のもっと高機能なソフトを使う場合には、この保安装置としての機能ももう要らなくなってきていると思います。単にストラクチャー(リアルな情景パーツ)として使用するだけで十分です。
自動運転ソフトでは、その部分もソフトの方が優秀でしっかり管理・制御できているので、事故が起きないようになっています。
実際に私はRocrailを使い始めてから、1回も事故ったことはありません。
自動運転ソフトは、事故が起こせない仕組みになっています。
事故が発生するかもしれない可能性が発生した瞬間に、すべての列車がスムーズに停車するように作られています。
対して、CS3は事故が起こせる仕組みです。事故が起こらないようにするには『人間が考えて設定してください』という機能しかないのです。
そこに、性能・機能の違いがあります。
現実のリアルの鉄道の歴史も全く同じになっていて、地上に信号設備があるのは、もう過去です。昔の国鉄みたいな話なんですよ。
今の新幹線に地上信号機ってありますか? ないですよね。
つくばエクスプレスに地上信号機ありますか? ないですよね。
地下鉄の最新路線に地上信号機ありますか? ないですよね。
それどころか、ゆりかもめに運転士さん乗っていますか? 乗っていないんです。
国鉄時代からあるJR九州のローカル線の香椎線に、運転士さん乗っていますか?
乗ってはいるのですが、運転はしていません。しかも、今年から乗らなくなるんですよ。自動運転なんですよ。
ドイツのICEが高速走行区間を超高速で走っている時、指示を出さない地上信号機は消灯しています。
運転席には前を走る列車との車間距離が表示されているのです。
現在の鉄道はコンピューター制御がメインです。
デジタル鉄道模型と同じように、コンピュータープログラムで走ってるんです。
鉄道マニアだからこそ、信号機は過去の情景を再現するのはいるんですけれども、信号で止めるっていうのは、もう今の鉄道には合っていないのです。
先ほど書いたように、リアルの鉄道も信号機だけだと事故りまくるからなんですよ。
東海道新幹線は開業以来、乗ってる乗客が死亡した事故っていうのはゼロなんですね。
山手線より本数が多くて、3分に1本「のぞみ」が来るような高速鉄道で、それを何十年も実現しているのは、地上信号機ではない保安装置を使っているからです。
それが現代の鉄道なんですよ。
現在の鉄道では、信号がないわけではなくて、地上設備としての信号機がないのであって、今まで地上設備の信号機がやっていった機能はどこにあるのかっていうと、運転席だったり運転司令室の画面にあるわけです。
それはCS3の画面に出ている状態と全く同じことなので、時代設定によってはそちらの方がリアルなんですね。
そして、日本のアナログ鉄道模型はずっと変わらないですが、ヨーロッパのデジタル鉄道模型は、メルクリンでもDCCでも、常に進化しています。
新しい機能が増えて、新しい運転ができるようにアップデートされているのです。
ユーザーはキャッチアップしていかなくても良いのですが、それなら、別に最新の機器を買う必要は全くありません。
ただ私は進化することが好きなので、新しいものが好きなので、キャッチアップしていく派です。
もちろん模型ですから、昔の情景を再現したよとかそういうのは全然問題ないんですが、自動運転でたくさんの列車を走らせるってなってくると、見た目は昔であったとしても、運転の仕組みは、リアルの鉄道と同じ最新の運転司令を使った方が、事故もないし、安全に楽しく走らせられるってことなんです。
情景と車両が昔だからといって、止める仕組みや運転方式も昔のやり方をする必要はないんです。
そもそも鉄道模型はSLだって電気で走っているわけですし、新しい方式で遊ばないのなら、ずっと変わらないアナログNゲージの方が優れています。Nゲージはアナログの仕組みを維持しながら、進化していますから。
では、鉄道模型において、実際に信号機による保安設備が有効に働く部分ってどこなのって言うと、列車がぶつかりそうなところなんですよね。
ここ重要で、『列車を止める』のはもちろん列車が止まる可能性がある場所になるわけですけれど、『列車を止めておく(ぶつからない)』場所になると、列車が止まる場所とは関係なくて、事故になりそうなところに場所が変わってくるんですよ。
具体的には、駅や支線が分岐していて本線と合流しているとか、ヤードでいっぱい列車が止まっていて、次々と本線に線路が集約されて出て行くところとか、または本線同士が平面でクロスしていてタイミングが悪いと正面衝突するよっていうところとか、そういったところなんですね。
ヤードで言えば、電気的に切るならヨーロッパのレイアウトだと多くが地下とかの隠しヤードになっていたりするせいもあって、m84とかで線路の区間丸ごとがっつり電源を落としちゃったほうがコストも安いし便利だよねってなるんですね。
駅だったり平面クロスしてるところでも、事故らない、緊急停止させるって意味では、ある程度の距離の長さの区間の電気を一発で落とした方が良いです。
そこで実感的に本当の列車の非常ブレーキみたいに滑らかにブレーキングしてたら、模型ではぶつかるじゃないですか。
事故ったらだめなところは、急停車させないといけないんです。
CS3だと拡張モードにしないといけないですが、極論すると、ぶつかりそうだったらCS3のSTOPボタン自体を(コントローラーが自動で)押すっていうイベントも組めるんですね。
そういう意味では、保安装置は信号機だけでなく、メルクリンでも様々な機器を、適材適所で構成できるということになります。
そうすると、信号機にブレーキモジュールでサウンドを鳴らしたままゆっくり止めるよっていうのは、さらに場所が限られてくることになるんですね。
このことはメルクリン公式も説明してますけど、ブレーキモジュールは閉塞区間で使うことを想定されている機器なんです。
要するに長いエンドレスのオーバルがあって、そこに何本も列車を走らせたときに区間ごとに切っていて、前の列車に追いついたら後ろの列車を少し速度を落とすとか、止める必要が出てくるので、その時にはサウンドが切れたら困るし、ゆっくり止まっても(閉塞ごとに十分な距離が確保されているので)いいんじゃないってことでブレーキモジュールが使われています。
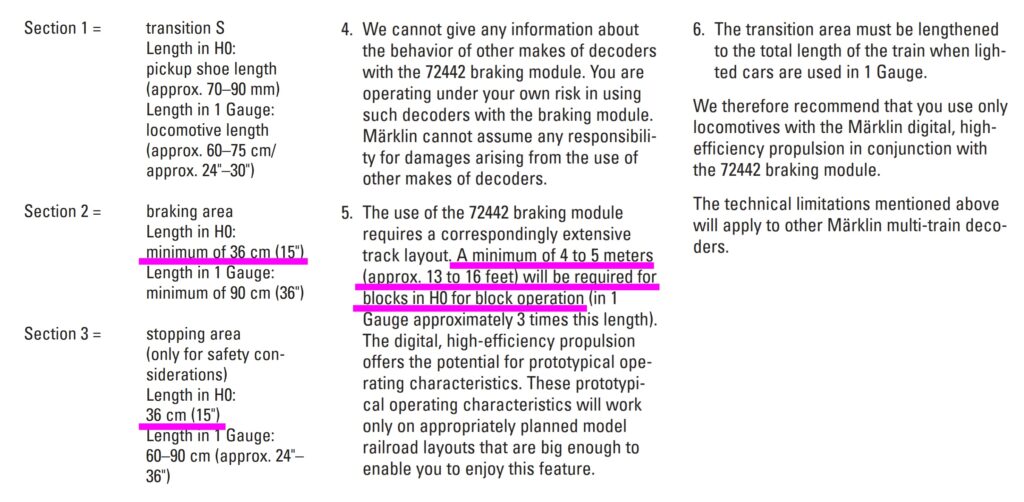
メルクリン公式の説明書では、ブレーキモジュールの、ブレーキ区間が最低36cm以上、緊急停止区間が36cm、線路長は4~5mの大型レイアウト(HOの場合)での使用を想定していると、書かれています。
これは相当大きなレイアウトになります。
ブレーキモジュールには制約もありますので、先頭が機関車でないとダメとか、そういうことがあって、必ずしもどの編成にも対応できるわけではないので、閉塞制御も、現代ではコンピュータープログラムで制御する方が汎用性の高いやり方になっています。
ただし、CS3の閉塞制御に関する機能は非常に貧弱です。メルクリン公式でも何回か議論になっていますので、現実的には本格的に閉塞制御を自動運転で行うには、自動運転ソフトが必要です。
まあこれは、YouTubeの動画とかで、日本ではなくて海外のヨーロッパのマニアの人の動画とかを、見てもらえばすごくわかります。皆さんそうやって遊んでいますから。
もちろんCS3やZ21は使っているんですけど、機能面としては、それとは別に自動運転ソフトだったり、他の機器と連動させてレイアウトを作る。それが現代のデジタル鉄道模型の最終、本格的な自動運転レイアウトってことになるかと思います。
誤解しないで欲しいのは、信号機やブレーキモジュールが時代遅れだとか、使えないよって言ってるわけではないです。
現代のデジタル鉄道模型の主流のやり方や、今後の方向性も知った上で、信号機のデメリットメリット値段なんかも分かった上で、こういう理由で信号機をここに選んでつけてるよっていうレイアウトと、列車を止めるには絶対信号機が要ると思い込んでいて、盲目的に使っているのは全然違うよっていうことを理解してほしいということです。
列車の方向転換をするのならアナログの自動運転の方が簡単
次は自動運転の運転のやり方です。
最初の方で書いたように、自動運転はデジタルの専売特許ではなくて、アナログ鉄道模型でもできます。
自動運転と言っても色々な規模とレベルがあると思うんですね。
私が長年やってきた中で、ひとつのハードルというか、レベルの大きな階段になってるところがあって、それは列車の方向転換をするかしないかっていうことです。
正直、自動運転の中で一番難しい、学習するのにハードルが高いところは、この列車の方向転換なんです。
列車の方向を変えることができると、単純エンドレスのレイアウトであっても、右回り左回りみたいな走り方ができますし、引込線みたいなところに列車を入れて、向きを変えてまた出してくるみたいなこともできるようになりますね。
あとは単純にシャトル運転(往復運転)なんかも両端で列車の方向を変えないといけないです。
この方向を変えるっていうことが難しいために、シャトル運転なんかも難しいと思われてるんですね。
まあ実際のところ正直ちょっと難しいとは思います。
ではなぜデジタル鉄道模型で列車の方向転換が難しいのかを説明します。
これは単純で、直流のアナログ鉄道模型の場合は、電気工作的な仕組みで列車の方向を変えることができるんですけど、交流のアナログ鉄道模型とデジタル鉄道模型では、電気的な仕組みだけで列車の方向を変えることがかなり難しいからです。
頑張って作ればできないことはないですが、少なくとも普通に市販されている機器でそれを実現できる機器がほぼないんですね。
なので、列車の方向転換をするには必ず、イベント機能(コンピュータープログラム)を作らないといけないです。
言い換えるとコンピュータープログラムでないと、デジタル鉄道模型では列車の方向転換ができないんです。
方向転換が難しく感じるのは、日本にはデジタル鉄道模型がないため、コンピュータープログラムによる自動運転の経験がある人が少ないから、だと思います。
コンピュータープログラムによる運転に慣れていけば、実はそれほど難しいことではありません。
これは日本型の車両ほど大きな問題になってきます。
ヨーロッパの鉄道は、つい最近までほとんどが機関車が引っ張るタイプだったので、頻繁に方向転換はそもそもしないです。
方向転換ではなくて、駅に着いたら機関車の機回しをするとか、付け替えるみたいなことの方が普通であって、先頭機関車の列車が駅で折り返してそのまま後ろ向きに走るっていうのは、制御車が先頭についているようなプッシュプルタイプの列車でない限りはあまり行われないんですよね。
ところが、最近の高速鉄道の電車タイプだったり、日本型の鉄道はほとんどが動力分散式の電車タイプなので、そういうのは終着駅に着いたら必ず方向転換しますよね。
ちょっと昔までは、ヨーロッパの鉄道模型であれば方向転換は無視できたんですよ。
別に方向転換しなくても充分実感的なんですよね。だから、海外型なら、方向転換が難しくても問題にならないんです。
でも日本型の鉄道模型やりたいとか、ヨーロッパでも制御車があるとか、車庫入れしたいよってなると、方向転換はしなければならなくなります。
そこでちょっとした壁にぶち当たることになるんですね。
一方で、アナログDCの鉄道模型であれば、方向転換はめちゃくちゃ簡単なんですね。
だって+-の電極を入れ替えれば、モーターが逆転するわけですから、複雑な仕組みなくてできるんです。
TOMIXがTNOSというアナログで自動運転できる仕組みを出していますが、初めの方に書いたように、Nゲージで日本型の車両で自動運転するなら、TNOSが圧勝なんですよ。
TNOSの運転をCS3でやろうとしたら、めちゃくちゃ難しいんです。
※自動運転ソフトを使うのなら非常に簡単です。
ただTNOSはそんなに流行っていないようにも思います。
これは自動運転がつまらないのではなくて、アナログのNゲージで出来る自動運転は、必ずパターン運行になってしまうことと、アナログではサウンドや照明といったファンクションや連動機能がないことから、飽きやすいからではないかと、個人的には思っています。
つまり、TNOSはアナログ鉄道模型にとっては不得意な(良さが伝わりにくい)分野の商品であるとも思いますね。
ヨーロッパの鉄道模型では、メルクリンは三線式なので、リバースが簡単に組めることのメリットは、まさにこの部分に影響してくるんですね。
先頭機関車の列車をそのまま向きを変えようとしたら、リバースで戻すしかないんですよ。
このことが、二線式だと、簡単に戻せはするんですけれども、リバース区間が編成全体の長さが必要だとか、メルクリンの三線式に比べたらちょっと考えないといけないことが多い分だけ、面倒だよねっていうのがあったんですよね。
でも今はやや難しいとは言っても、コントローラーにコンピュータープログラム乗った段階で、自動運転でいくらでも列車の方向転換ができるようになったんです。
正直CS2で、コントローラーがコンピューターになった段階で、本質的にはメルクリンとDCC、つまり、二線式と三線式の差は(運転上は)もうないです。
というか、二線式の方が、今までそこで悩んでいた分のデメリットを、コンピュータープログラムで解消できるために、運転の仕組みについては、業界をリードしているというか、考え方が先進的です。
言い方は悪いですが、メルクリンの方が、そこは古臭くて、今ではやや遅れている部分もあります。
例えば、デコーダーについても、メルクリンは機関車側からコントローラーに、情報をフィードバックする仕組みがないんですけれども、DCCではそういうデコーダーやセンサーって普通に売られていて、何番線に実際にどの機関車が入っているかをコントローラーが判別したりとか、そういうこともできるようになっています。
ちょっと話が脇道にそれましたが、要するに本格的な自動運転をやろうとしたら方向転換をマスターするっていうことが必要不可欠になるってことは、認識しておいていただきたいです。
逆に言うと、デジタル鉄道模型なのに方向転換を自由自在にできないと、アナログのNゲージに劣るっていうことです。
これもYouTubeとかで動画見てもらったら分かるんですけれども、エンドレスのオーバルが何本かあって、駅に止まるとか、たまに抜かされるとかで、ぐるぐる列車がたくさん走るよっていう運転であれば、仕組みを知らない一般人が見た場合、Nゲージのレイアウトの方がすごいな、たくさん走ってるなって見えると思います。
デジタル鉄道模型で、SLから煙が出てるとか、そういうことをすれば、その部分はデジタル鉄道模型の方がすごいなと思ってもらえると思いますが、単純に列車の動きだけ見た場合は、Nゲージの方が小さいですから編成や車両数も多いため、勝てないんですよね。
だから、日本のアナログ鉄道模型の人たちから見ると、デジタルの一番のメリットがサウンドだと見えると思うのです。
言い換えると、サウンドを除けば、動きとしてはアナログで何の問題があるの? アナログの方がいいじゃない?っていう発想は、それはそれで正しいと思うんですよね。
方向転換が、デジタル鉄道模型でなぜ難しいのかというと、どっち向きに機関車が走るのかを常に管理しないといけないからです。
デジタル鉄道模型の場合は、どっち向きに走るかっていうのも命令で出さないといけないじゃないですか。
なので、線路に乗っている機関車の向きと、走らせたい方向の二つを常に分かって運転していないと、正しい向きに機関車を走らせられないんですね。
メルクリンの場合は、実はアナログ時代から線路に流れてる電気は交流で、機関車には逆転機が乗っているんですね。
メルクリンだけは、アナログであってもロボットの運転士が乗っている状態なので、そもそも+-を逆転させるっていう発想自体がありませんから、アナログ時代から自動での方向転換は難しかったわけですよ。
なので、方向転換が簡単なDCのアナログから、方向転換の難しいDCCのデジタルに移った人の方が、ショックが大きいとは思うんですけれども、いずれにしても方向転換をやるためには、かなり正確・精密な管理が必要です。
一方で、方向転換も自動運転ソフトを使えば非常に簡単です。
簡単というか、人間は考えないで良くて、コンピューターソフトが勝手にすべてを上手くやってくれるので問題ないのですが、CS3にはそこまでの機能と性能が備わっていないので、自分で理解して考えて作らないと失敗します。
例えば、Rocrailであれば、駅の区間に『この駅は終端(頭端式)駅です』または『折り返しを許可する駅です』、電車タイプの列車に『この列車は通勤列車(折り返し運転ができるタイプの車両であるという意味)です』の2つの設定をするだけで、列車は自動的に方向転換をして折り返して走っていきます。
これから自動運転を始める人は、この方向転換を1つのメルクマールとして考えてもらうといいかなと思います。
ここで悩みたくないよって人は、日本人で日本型がOKなら、ぶっちゃけNゲージの方が楽だと思います。
正直、一般の人に見せた時に、やっぱりサウンドや煙以外で差をつけるっていうのはなかなか難しいんですね。
自動運転だけですごいなって思わせるには、本当にNゲージでできないような動きを作るしかないですし、簡単なのは煙を出したりサウンドをたくさん鳴らす自動運転プログラムを組んで見せるだけでいいんですが、運転パターンだけでは、デジタル鉄道模型の優位性を見せるのはなかなか難しいと思います。
デジタル鉄道模型は真ん中・中間層が弱い
本当の初心者が、買ってきて最初に走らせるっていう部分は、配線も簡単で、サウンドも鳴るし、煙も出るから、デジタルの方が有利なんですね。
ところが、ちょっとした規模のレイアウトになって、多くの人がやってるみたいに、何本かエンドレスの線路があって、そこに同時に何台か列車か走ってるよっていう、そういうレベルが一番弱いです。
これだとアナログのNゲージと見た目には差がなく、値段や簡易さは逆転していて、アナログNゲージが簡単なんですよ。
レイアウトの作り方も、Nゲージならストラクチャーもいろいろな商品が売ってますし、ポンと置くだけで、町の1つぐらいは簡単にできるんですよね。
全部がプラモデルになってるわけじゃないですから、完成品のまま売ってたりするところも、初心者に優しいと思います。
編成の車両数も多いし、見た目にはたくさんの列車が走っているように見えますから、ここがデジタル鉄道模型が理解されていない、おそらく一番の原因だと思うんですけど、デジタル鉄道模型の一番弱いところなんですよね。
Nゲージにとっては得意な分野、長所を見せる商品や売り方をしているのに対して、デジタル鉄道模型のミドルレンジは、なかなか良さが見えにくい、伝わりにくい分野で戦うことになるように感じます。
ヨーロッパなら、デジタル鉄道模型が当たり前ですから、簡単なレイアウトでもデジタルで問題ないのですが、日本はアナログがすべてで、しかも製品も良くてある程度のレイアウトなら出来てしまっているので、そこにあえて『デジタルですよ』と言って、説得できるだけの魅力を見せるのが、ミドルレンジでは難しいという意味です。
これを超えて、博物館みたいないろんな列車が複雑に走行して、サウンドや演出も混じってるよっていうところにくると、これはもう明らかにアナログではできないってなるので、このハイエンドというか超マニアですよね、そこまで行けば、またデジタルの方が優位性があるとはっきりと伝わると思います。
ハイエンドについては、必ずしも大規模なレイアウトとか複雑な演出をしなくてよくて、駅のワンシーンみたいな、ちょっとしたことでいいとは思います。
むしろ自宅のレイアウトだと、エンドレスの1周線路を引くスペースないなって人もたくさんいると思うので、そういう意味では、本当に小さな机の上で直線が2本ぐらいあって、シャトルするんだけども演出も動きも複雑で、これはアナログでは絶対できないよねみたいなのが、究極のエンドコンテンツ的な意味では、デジタルの凄さを見せ付けられるレイアウトなんだと思います。
私の動画では、こたつの上で機関車が往復して、牛の横を通ったら牛が鳴いて首ふりをみたいな、ああいうのが多分一番ちょうどいい感じだと思います。
日本でもスペース的にも向いてる気がしますし、ああいったギミックが、デジタルの魅力なんだと個人的には思っています。
もちろん鉄道模型の楽しみは、レイアウトと走らせることだけじゃなくて、コレクションして楽しいってのもありますし、車両をカスタマイズする、ウェザリングしたりとか、そういうのが楽しいっていうのもありますし、ジオラマ作って楽しいってのもありますので、自動運転がすべてではないです。
けれど、自動運転をやるよっていう人は、現代では、ここに書いてあることはちょっと頭の片隅に置いおいてもらった方が良いかなと思います。
MS2は過小評価されがち
最後に、これはメルクリンだけの話になりますが、MS2(モバイルステーション)は過小評価されがちだと思います。
私自身もいまいちかなって思っていた時期があるので大きなことは言えないですが、MS2は思っているよりも優秀なコントローラーで、幅広く使えますし運転にも便利なコントローラーだと思います。
例えば、上に書いたNゲージでもできるような、何個かオーバルがあってぐるぐる列車が走って、駅に止まるみたいなものであれば、別にCS3は要らなくて、MS2でも十分できるんですね。
それこそ、MS2だけで構成した時には、信号機とブレーキモジュールは真価を発揮できるようになってると思います。
CS3を使うのだったら、イベント機能ですね、センサーとコンピュータープログラムの部分、これを使わないと意味がないと言ってもいいと思います。
CS3とセンサーを持っていれば、イベント機能でどんな自動運転でもできますので、そこに信号機やブレーキモジュールを使用する必要性は低いですが、MS2なら、話が全く違って来て、自動運転を実現する重要なパーツになるんですね。
逆に言うと、MS2でできないことは、このイベント機能の部分だけで、他はMS2の方が使いやすいんですよね。
まあ、CS3とは値段が全然違うので、そういう意味ではMS2は、コスパがいいと思います。
実際に、私は手動の運転操作はほとんどMS2でやっています。
セントラルステーションもCS2、CS3とずっと使ってきたんですけど、CS2はUIも良かったのですが、CS3で手動運転するっていうのは結構やりにくいです。
ぶっちゃけ、私は、CS2の基本操作の説明はアップしてありますが、CS3は自動運転の解説とかはしていますが、基本操作の説明はしていないですよね。
この理由は、どうやって説明したら、CS3が操作しやすくて、わかりやすくて、使ってみようと思うんだろう?という答えが納得いってないからです。
ウインドウの位置なども人によってバラバラになりますから、ここをタッチしてと言っても、そのボタンが表示されないんだけど?みたいな場合もあるので、まずUIの構造から説明しないとわからないんですよね。
正直、CS3以外の(鉄道模型だけでなく一般の)機器には、こんなインターフェイスはなくて、あまりに独自で特殊過ぎるので、まず機能以前にその部分で強烈にとっつきにくさを感じることが問題です。
質問をビデオ通話でしか受けていない理由もここにあります。バージョンによる違いも非常に大きいですし、1つ1つ違うので見ないとわからないですよ。
メルクリンの宣伝とか紹介の説明を見ると、タッチ操作で選んで運転するよっていうその文字の聞こえは良いんですけど、実際に模型の列車を運転するのに、タッチしたりとかドラッグしたりしないといけないっていうのは、もう邪魔くさいという感覚しかないんですね。
また、おそらく動画でもタッチを本当に使っている人は、私くらいのもので、ほとんどの人がマウスで操作していると思います。
単に列車の運転をするだけなのに、マウスという別の機器を必要とする時点で面倒くさいわけですし、どうせマウスを使うのならパソコンやスマートフォンの方がもっと使いやすいわけです。
なおタッチ操作と言っても、これまたスマートフォンやパソコンなどのタッチ感覚とはかけ離れたものであり、現代のタッチデバイスのイメージでは操作できません。
一応、CS3には簡易モードっていうのがあって、レイアウト図やセンサーなどの画面を隠して、CS2みたいな単に速度計と機関車のリストだけを出すようなモードがあるんですけど、それだとCS2と似た感じになるので、タッチ運転でもなんとか妥協できる感じです。
普通の標準モードのCS3で手動運転すると、画面にはいろんなウィンドウが表示されていますので、それをどけながら操作しないといけないんですね。
ポイントを変えて、列車動かして、ファンクションも触ってみたいな運転をすると、もういろいろ触って、ずらして、ドラッグして……ってイライラします。
特に自宅のレイアウトのような、自分の車両が何があって、どう走ってるかっていう、走らせ慣れてるっていうんですかね、そういうものであればあるほどMS2の方が操作しやすいんですね。
32ファンクションを常にフルに使う人もほぼいないでしょ?
あれこそ、イベントを組んで演出しないと使わないようなサウンドなどが、特に9番目以降は多くなっているので、警笛やライトとかならMS2で十分です。
確かに、MS2はモノクロ画面ですし、アイコンの写真で列車を判別することはできないですが、自分のレイアウトで自分が持ってる列車で、アイコン見ないとどの列車かわからないってことってないですよね?
走らせる車両が40台以下であれば、多分ほとんどの人はどのスロットにどの機関車がいるかっていうのは、もう感覚的にわかって覚えていると思います。
正直なところ、スループット(目的を達成するまでの総合的な操作時間)的にも、CS3の画面で、下からタッチして、機関車リスト出して、その中からアイコンで視認して選んで、または検索とかして、それを左右にドラッグして、ファンクションを引っ張り出して、タッチして動かして走らせるっていう、そこまで全体にかかる時間と、MS2で感覚的にくるくるってノブ回して、目的の機関車出してそのまますぐ走らせられるっていう時間を比較すると、MS2の方が断然速いんですよ。
信号機とかポイントの操作もそうで、博物館みたいなレイアウトを作っていない限りは、ポイント・信号機で、いつも操作するところはそんなに多くないんですよね。
特にメルクリンの場合は、スプリングポイントが機能しますので、走らせていながらポイントを頻繁に変えないといけない場所はそんなになくて、例えば、ヤードにしまうよみたいな時には何個かポイント操作をするんですけど、それもいつもやってることなので割とパッと行けるんですよね。
CS3なら、ルートを構成するイベントを作って置けますが、そのアイコンをタッチするのに、またレイアウト図を表示させたり、検索してイベントリストから表示させたりしている間に、慣れているMS2の方がやっぱり速いんですよね。
むしろCS3の方が誤操作が多いというか、かなり実感的に細かくレイアウト図を書いてしまったりしていると、マウスであっても余計なところまで触ったと判定されて、ああ!!ってなったりとかストレスが高いんですよね。
レイアウト画面は写実的に描くのではなく、操作盤として操作しやすく描くことをお勧めします。
私はもちろん、CS3をめちゃくちゃ使って運転してるんですけど、自動運転でイベントを組んだりとか制御するための設定を行ったりするには、CS3をすごいタッチするんですけど、手動含めて実際に列車を走らせる時にCS3をタッチすることは、ほぼ100%ないんですね。
録画運転の説明でもMS2を推奨しているでしょ?
CS3に繋いだMS2で操作した方が早いですし、じゃあスマートフォンで操作するのかっていうと、たまにする時はあるんですが、スマートフォンのインターフェースがまたCS3ライクなので、スマートフォンとMS2を比較すると、MS2の方がやっぱり鉄道模型を走らせるって意味ではしっくりくるんですよね。
動画でちょっとだけ紹介したことがあると思うんですけど、MS2でも簡単な自動運転はできます。
それこそブレーキモジュールと信号機の組み込みとか、m84を使って単純に後ろの閉塞の信号機を赤にするとか、そういうレベルの自動運転だとできるんですよ。
オーバルがいくつかあって、それぞれの周回線路に2つの列車を行き違いで走らせてるよ、みたいなパターンであれば、MS2で全然問題なくて、仮に電力容量が足りなくなってきても、各オーバルごとにMS2をつけても問題ないんですよね。
そのやり方は、私もイベントとか運転会とかでは、そういう走らせ方をしてるんですね。
特にイベントだと、CS3でフル制御していると、どっかで1回事故ったりして止まっちゃうと、全ての列車が止まってしまうんですよ。
そうするとお客さんにはがっかりされちゃうので、MS2でオーバルごとに区切って、事故っても他は全く影響ないよっていうふうに電気的にも分けてるんですね。
そう考えるとCS3は、やっぱりイベント機能をメインに使う、私のように自動運転の設定をするとかね、そういうのに向いているのであって、手動運転はこの前MS WLANというモバイル版のMS2が出ましたけれども、あれもなんとなくわかる気がしていて、そこそこ便利なんですよ。
上のほうに書いたように、デジタル鉄道模型の良さって何だろう、自動運転の良さって何だろうって考えた時に、かなりガチ勢で自動運転やり込むよって人以外は、MS2の守備範囲はかなり広くて、相当遊べるコントローラーなんですよね。
自動運転やるよって人も、日本では売ってないんですけども、ドイツではMS2が繋がるレールボックスにパソコンを繋げるようなインターフェース機器も売っていて、それを介するとパソコンの自動運転ソフトとMS2というか、レールボックスなんですが、それでフルの自動運転も出来るんですよね。
それだとCS3は要らないんですよ。
それが便利かどうかはちょっと分からないですし、私自身はそういう使い方をしたことがないので、CS3はやっぱり必要で、自動運転では便利だと思うんですけども、思ってるほどMS2も悪くないよってことです。
個人的に特に誤解されているかなって思うのは、上に書いた中間層っていうんでしょうか。そんなにガチで自動運転をしたり、イベントガチガチに組むつもりはないよっていう人が、なんとなくフルカラーだからって言ってCS3を買うケースです。
正直人によるんですけど、フルカラーだから運転しやすいわけでもないですし。CS3でも簡易モードのインターフェースなら運転だけなら問題ないとは思うんですが、イベントを使わないのならMS2でもいいような気はします。
ちなみに簡易モードでも、その前にセンサーとかセットアップしておけば、センサーの感知とかはできるんですよ。
だから、ある程度センサーで自動運転してるけど、特定の列車を手動運転したいよ、切り替えたいよという時も、私は簡易モードに切り替えて使ってる時もあるんですね。
ただ簡易モードに切り替えるのも面倒くさいので、MS2つけておいた方が全然楽ではあります。
私に質問される方の中には、結構MS2だけっていう方もいらっしゃいますし、私もMS2を否定してるわけではなくて、むしろ使っていますので、そういう人は必ずCS3は買わなきゃいけないとか、CS3がないとたくさんの列車を走らせられないとかは、あんまり思わなくていいと思います。
MS2でできる運転を追求して、楽しんだらいいと思いますね。
どうしてもイベントによる自動運転がやりたい!のなら、CS3や自動運転ソフトは必要にはなりますが、その必要に迫られなければ、MS2で大丈夫だよということも書いておきたいです。