
コマンドステーションはCS3を例にしていますが、CS2でもやり方は同じで利用できます。
パソコン用のデジタル鉄道模型運転アプリ「Rocrail」のインストール・セットアップ方法の説明です。
RoacrailとCS3の違いについても説明しています。
CS2、CS3、CS3+、Z21の各コマンドステーションの接続方法を紹介しています。
実際に「Rocari」lでCS3+とZ21を同時制御して、3線式/2線式・HO/N混在のレイアウトを一括全自動運転する様子もご覧いただけます。
以下は、動画の公開前に「暫定版」として掲載していた内容になります。
上の動画をみていただいた方がわかりやすいと思います。
ラジオ
「セットアップした後」に気になるんじゃないかなと思う点として、センサーの設置と、手動運転について、ラジオで話しています。

Rocrailのセットアップ
自動運転ソフト「Rocrail」をパソコンにセットアップする手順を説明します。
Windowsの場合で説明していますが、「Rocrail」はMacintoshやLinuxでも利用できます。
Rocrailはセットアップとコマンドステーションの接続が一番ハードルが高いです。
ここを乗り越えれば、あとはチュートリアルに沿ってやっていけば、誰でも自動運転ができます。
頑張りましょう。
Rocrailのサイトにも、詳細なセットアップの説明がありますので、そちらも併せて見ながら進めてください。
ここに書いてある操作や手順は、最初は必ずこの通りに、1つも間違わずに行ってください。
自分で勝手に解釈して、異なる操作をしたり、手順を省略して、『動かない』という人が大変多いです。
Rocrailのインストールは通常のWindowsアプリとは異なっていて、特殊です。
正確に、書かれている通りの操作をしてください。
Rocrailのダウンロード
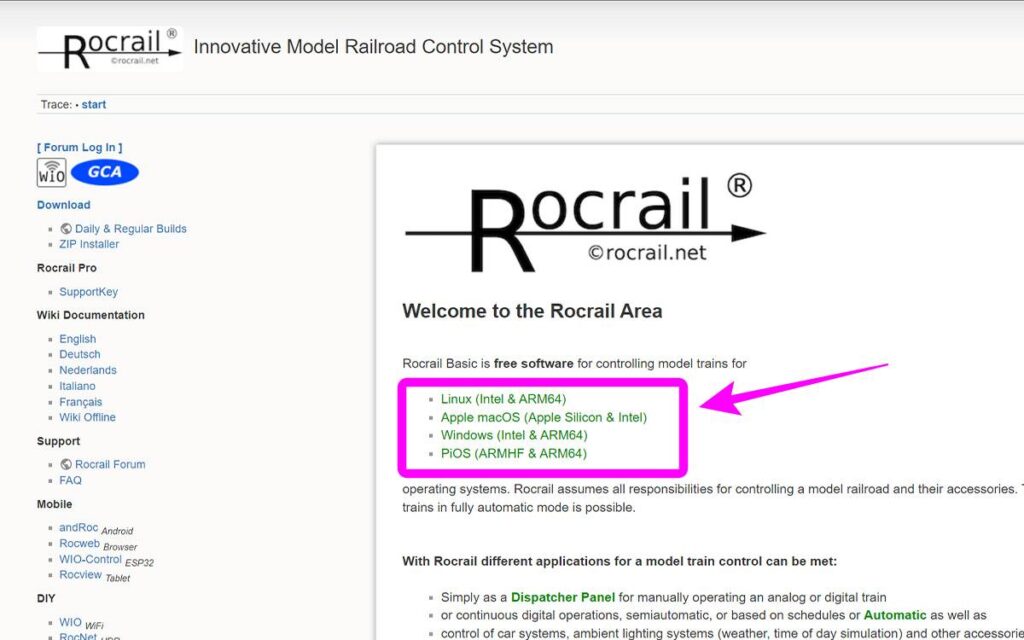
下記のRocrail公式サイトにアクセスして、セットアップ用ZIPファイルをダウンロードします。

トップページに各OSごとのリンクがありますので、利用するパソコンに該当したリンクをクリックしてください。
この記事では「Windows」を例にして進めます。
詳細なセットアップ手順が表示されますので、内容に従って進めてください。
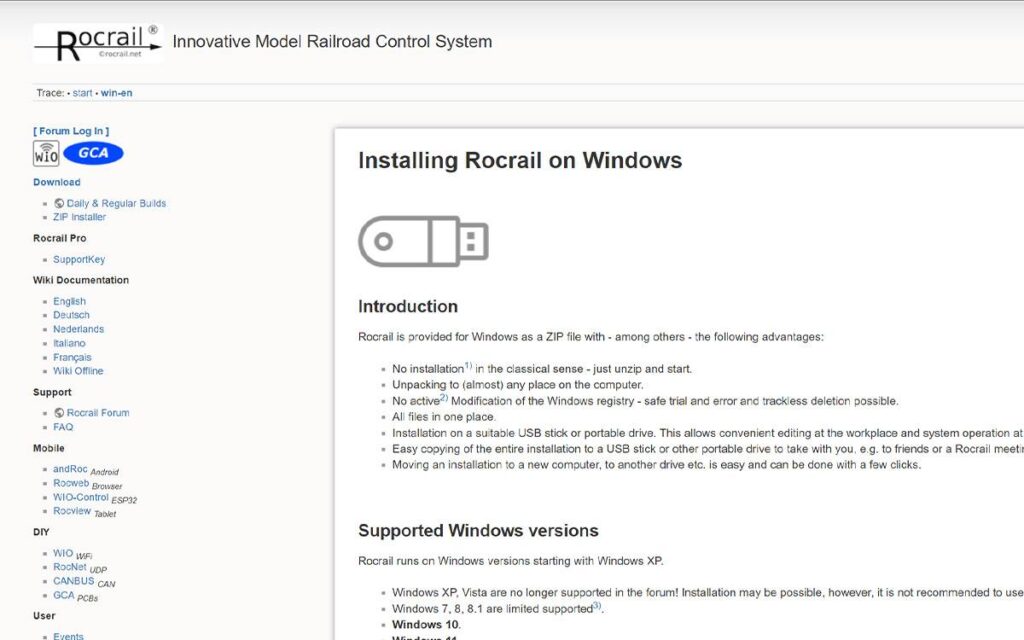
下の方にスクロールして、読み進めていくと、「Rocrail Daily Buildsページ」から、最新のファイルをダウンロードしてくださいと書かれているので、リンクをクリックして、ビルドページに移動します。
利用するパソコンのOSに合致したファイルをダウンロードします。
私は、Windows11を使用しているので、「Rocrail-Windows-WIN64.zip」を選択します。
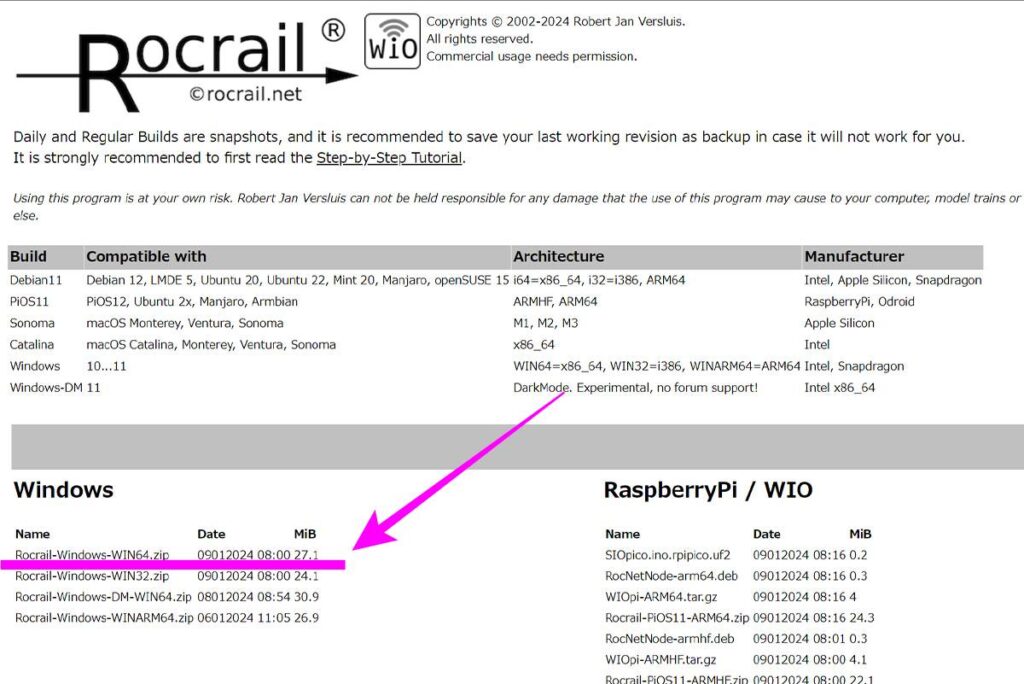
ダウンロードが始まるので、適当なフォルダーに保存してください。
必ず適切な種類のファイルをダウンロードしてください。
お使いのOSのバージョンとCPUをしっかりと確認してください。
Rocrail用フォルダーにZIPファイルを展開する
ダウンロードが完了したら、ZIPファイルを展開(解凍)します。
Rocrailはパソコンのストレージの中に、自分で好きな名前のフォルダーを作って、そこにインストールします。
ですので、あらかじめ、Rocrail用のフォルダーを作っておいてください。
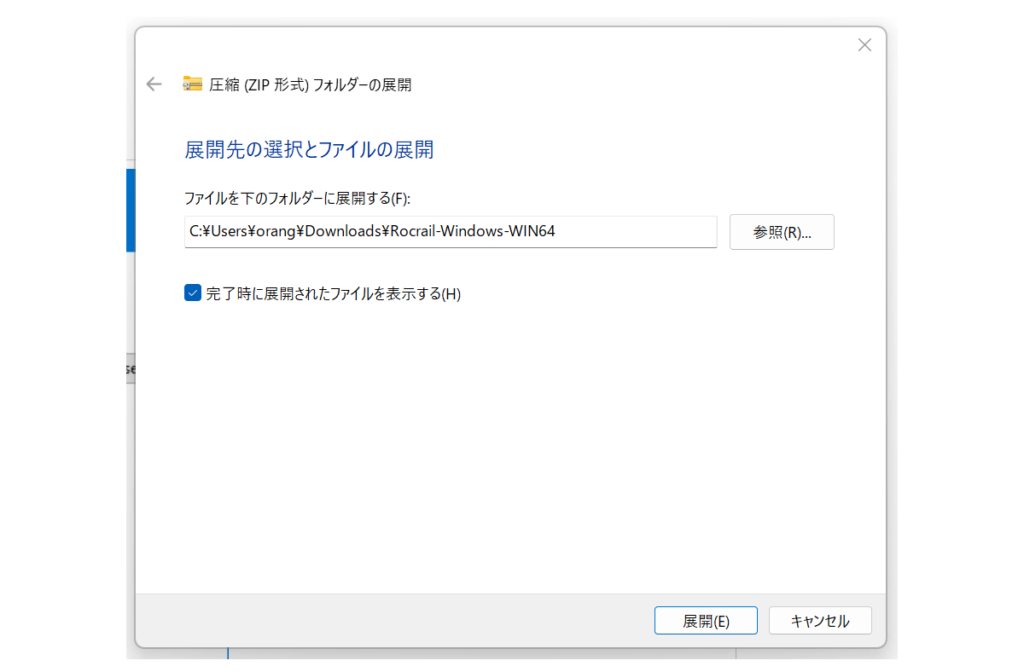
ダウンロードしたZIPファイルを右クリックして、「すべて展開」を選択して、中身を好きなフォルダーに書き出します。
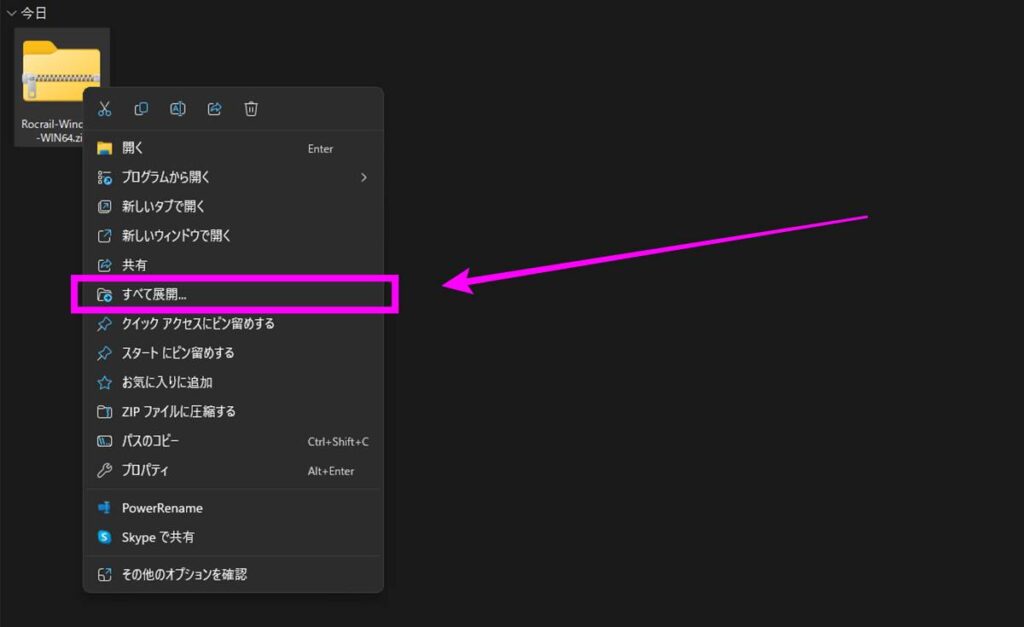
すでにRocrail用のフォルダーを作っていれば、そこに展開すればいいですし、まだ作っていないのなら、適当なフォルダーを作るか指定してください。
Rocrail用のフォルダー以外の場所に展開した人は、展開された中身のファイル群を、そっくりそのままRocrail用のフォルダーに移動してください。
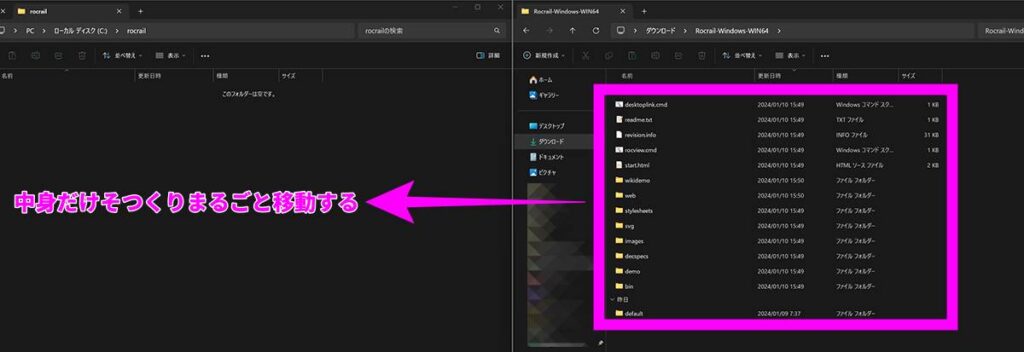
Rocrail専用のフォルダーを作っていない、展開したファイルをRocrail用のフォルダーに移動していない、ために『できない』『動かない』という人が大変多いです。
必ず、ここに書かれている操作と手順を守ってください。
以上でインストールは完了です。
デスクトップショートカットの作成
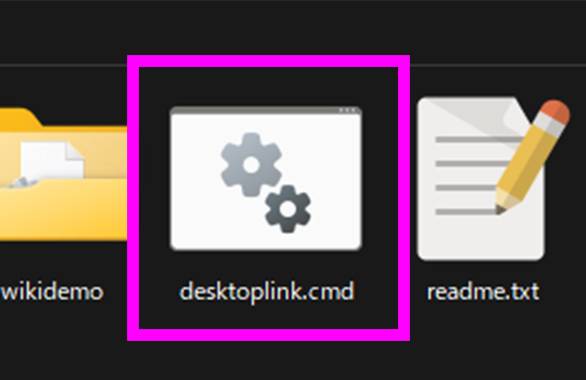
Rocrail用のフォルダーにファイルを全部移動したら、起動用のショートカットを作成します。
展開したファイルの中にある「desktoplink.cmd」というファイルを、ダブルクリックして実行してください。
これで自動的にデスクトップにRocrailの起動ショートカットが作成されます。
デスクトップ以外の場所にショートカットを作りたい場合、例えば、スタートメニューやタスクバーに登録したい場合には、デスクトップに作成されたショートカットを登録するか、ドラッグアンドドロップして登録してください。
初回起動と言語の設定
初回起動
作成された「Rocview」というショートカットで、Rocrailが起動します。
警告が表示されたら?
RocrailはMicrosoftの公式ストアに登録されているアプリではないため、Widnowsのバージョンによっては、初回起動時に警告が表示されることがあります。
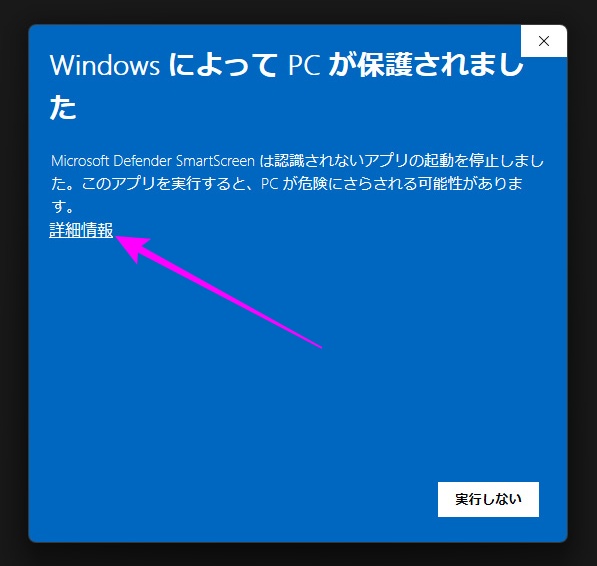
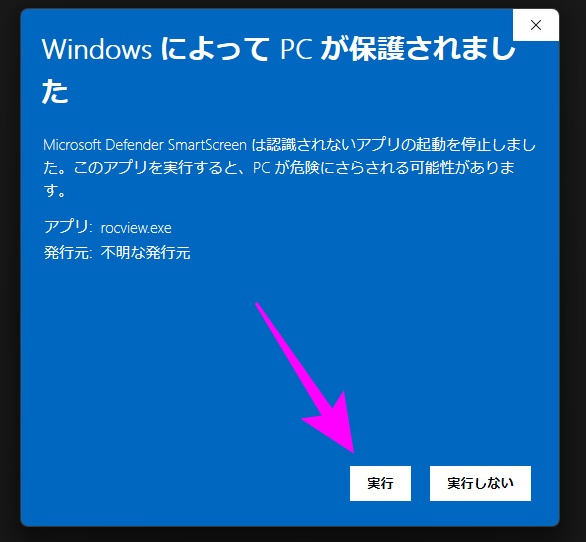
警告が出た場合には、「詳細情報」をクリックして、「実行」ボタンを押してください。
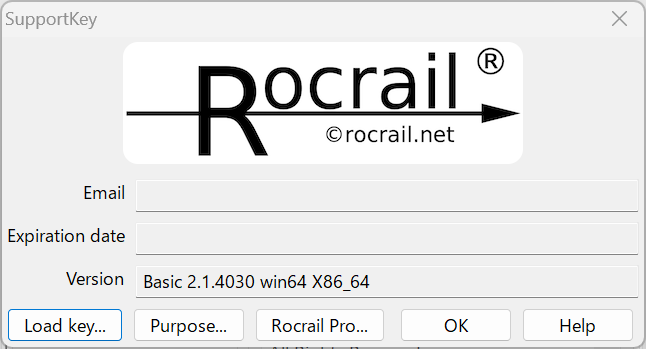
起動すると、アプリケーション本体のウインドウ以外に、2つくらいポップアップウィンドウが表示されます。
まずは下の画像のウインドウの「OK」ボタンを押して、このウインドウを閉じてください。
このウインドウでは、寄付(サブスクリプション課金)した時に、Pro版の登録を行います。
個人で利用する通常の自動運転であれば、無料のままで必要なすべての機能が遜色なく使えますので、そのままOKを押してもらって大丈夫です。
※起動時には毎回このウインドウが表示はされます。
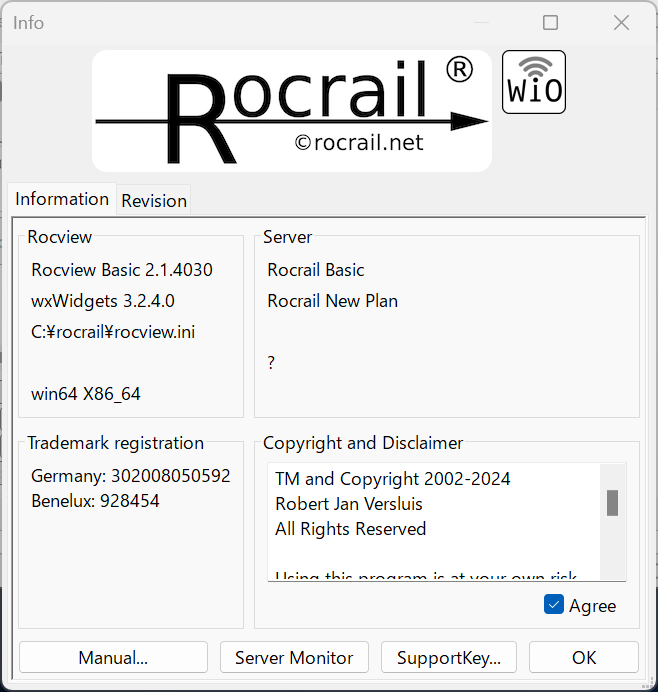
次のウインドウは、バージョン情報などが表示されています。
これもこのまま「OK」ボタンを押して閉じてください。
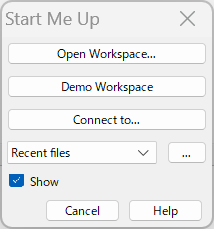
もし、すでに2回目以降の起動をした場合には、下記のようなメニューウインドウが表示されます。
これが表示された場合には、初期設定が済むまでは「Cancel」を押してください。
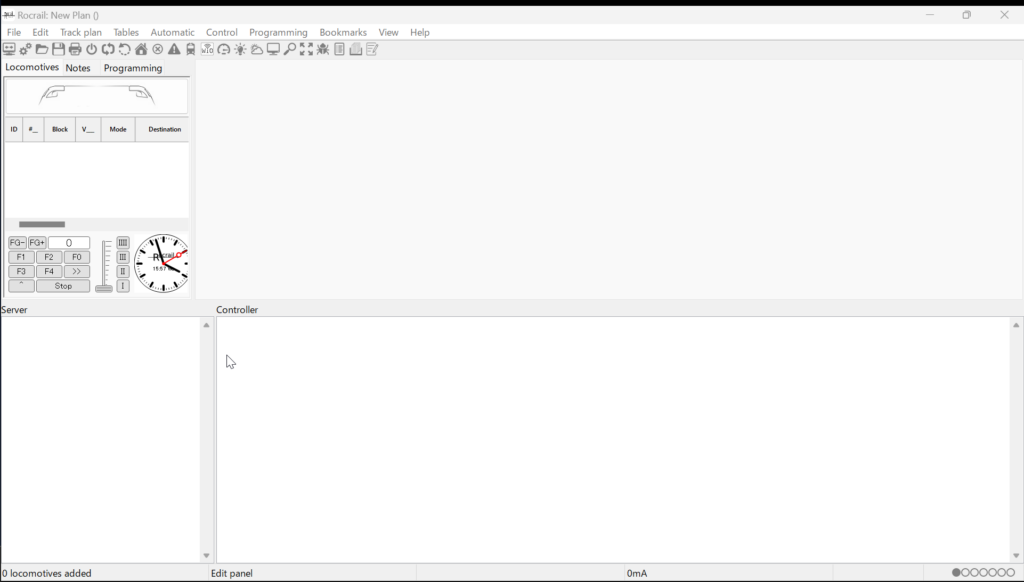
Rocrailの操作画面である「Rocview」ウインドウが表示されます。
Rocviewは、Rocrailの「操作部分(ユーザーインターフェース)」です。
この画面を使って、自動運転を行います。
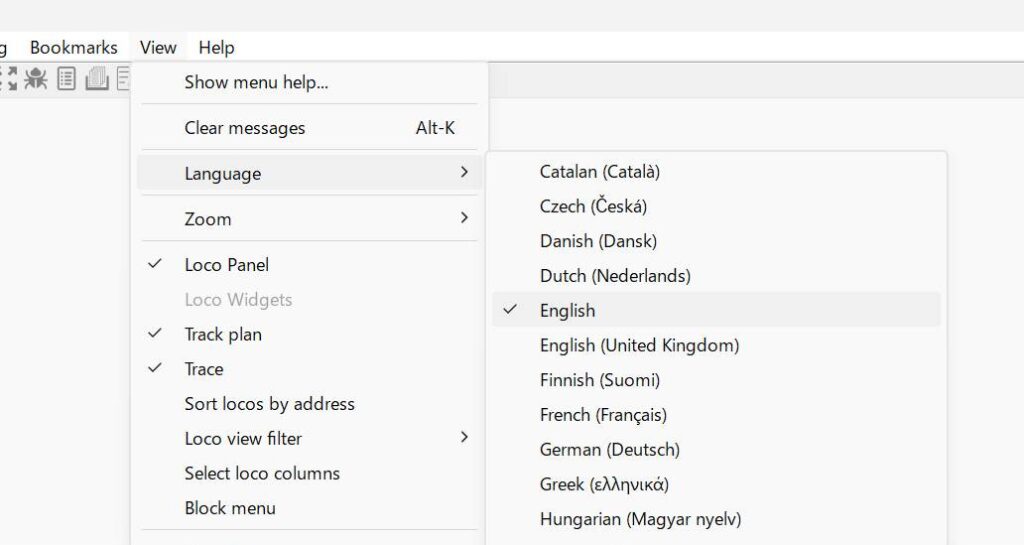
言語設定
最初に表示言語を設定します。
上部のメニューから「View」→「Language」→「English」と選択します。
Rocrailは多国語に対応しています。
ドイツ語がわかる人は「ドイツ語」を、そうではない一般的な日本人は「英語」を選んでください。
言語リストには「日本語」もありますが、「英語」を選択した方が絶対に良いです。
Rocrailはヨーロッパの鉄道システムを基本にしていることもあり、日本語を選択すると後で単語の理解に非常に苦しむことになると思います。
アプリを再起動する
設定が終わったら、いったんRocrailを終了します。
右上の×ボタンを押して、ウインドウを閉じます。
終了したら、起動ショートカットで、アプリをもう一度起動してください。
Rocrailは、アプリや鉄道模型システムに関する設定を行った際には、必ず再起動してください。
これは非常に重要です。
上手く動作しない原因のほとんどは、再起動していないことに起因します。
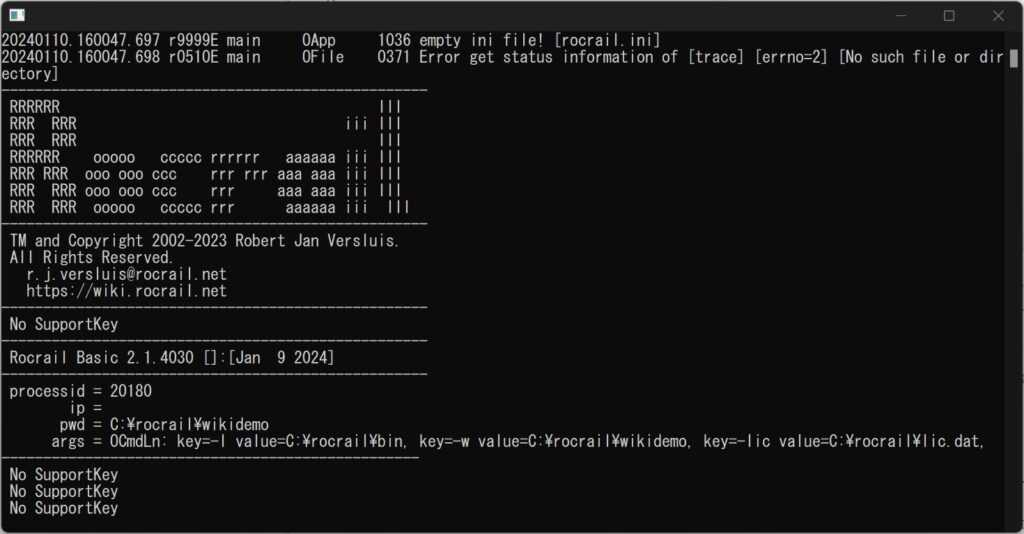
Rocrailサーバーを閉じないこと
Rocviewが起動している間、よく見ると、もう1つアプリが起動しています。
この黒い画面のものがそれで、Rocrailのサーバーです。
サーバーは、操作部分であるRocviewと、コマンドステーションの通信を担当するプログラムです。
サーバーを絶対に閉じないでください。
閉じてしまうと運転は出来なくなります。
仮想レイアウトで遊んでみる
最初に実際の自分のレイアウトで自動運転する前に、あらかじめ用意されている仮想のレイアウトと機関車を使って、Rocrailの仕組みと操作を学習することができるようになっています。
初めての人は、この仮想レイアウトを使って自動運転して遊んでください。
これは絶対にやった方がいいです。
リアルの模型は何も用意しなくても、すべてを体験できます。
操作も習得できるので絶対にやってください。
こう書いてもやらない人が多いと思いますが、絶対にやってください。
Rocviewを起動します。
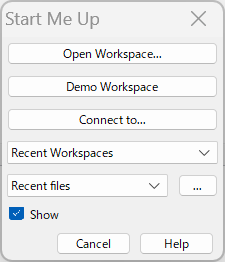
スタートメニューが表示されますので「Open workspace」ボタンを押してください。
フォルダーの選択画面が表示されるので、Rocrail用のフォルダーの中にある「wikidemo」と書かれたフォルダーを選択してください。

すると、画面にすでにレイアウトと機関車が存在している状態になったと思います。
下記の「Rocrail First steps」というチュートリアルで、この仮想レイアウトを使って、機関車を自動運転する説明が、非常に丁寧に詳しく書かれています。

実際の機関車は動きませんが、画面の中では、機関車がちゃんと動いて、自動運転が体験できます。
まずは、これで「あー、こうやって運転するんだ」という感覚を掴みましょう!
CS3を接続する
仮想レイアウトで、Rocrailの操作感覚が掴めたら、いよいよ実践です。
自分のレイアウトで、コマンドステーションを接続します。
この記事ではメルクリンのCS3を例に説明していますが、他のコマンドステーションでも問題ありません。
もちろん、2線式でもDCCでも大丈夫です。
自分のレイアウトのワークスペースを作成する
スタートメニューから、「Open Workspace」を選択します。
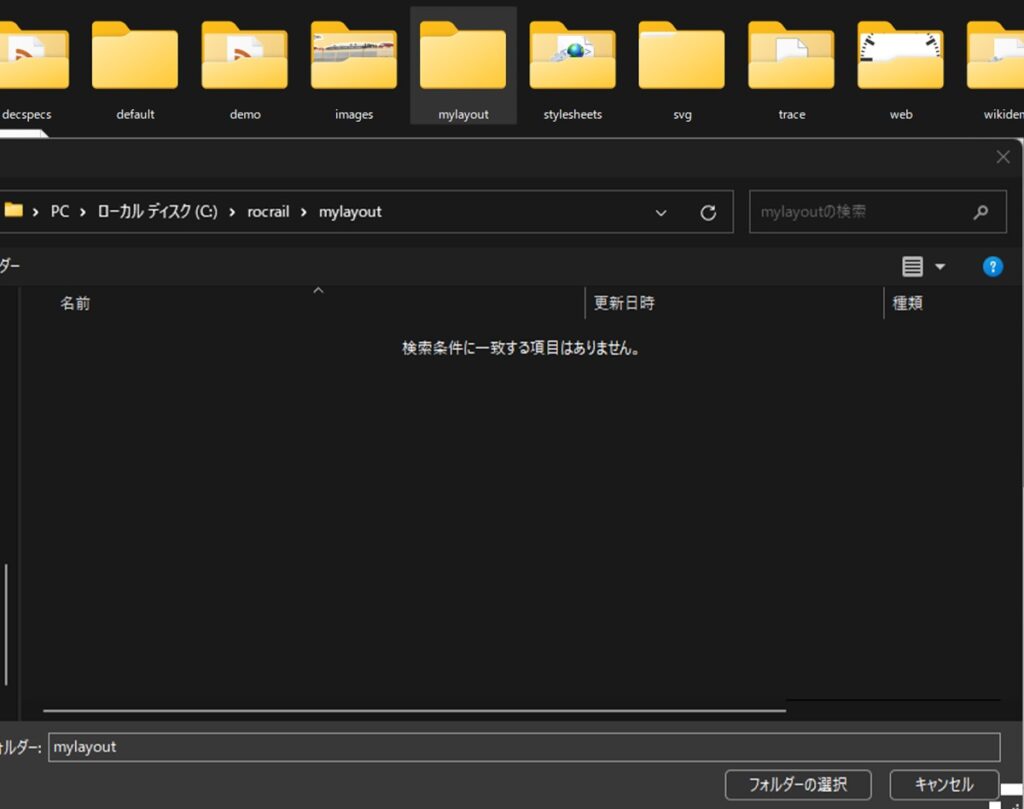
フォルダー選択画面になるので、「自分のレイアウト用のフォルダー」を新規に作成して、そのフォルダーを指定してください。
この例では、「mylayout」というフォルダーを作って、指定しています。
Rocrailでは、レイアウトのデータは、ここで作ったフォルダーに「Workspace(ワークスペース)」として保存されます。
ワークスペースを切り替えれば、レイアウトや環境を切り替えることが可能です。
また、バックアップもこのフォルダーをバックアップすれば大丈夫です。
今度は、仮想レイアウトではなくて、空白の、これから自分のレイアウトになる画面が表示されたと思います。
コマンドステーションを接続する
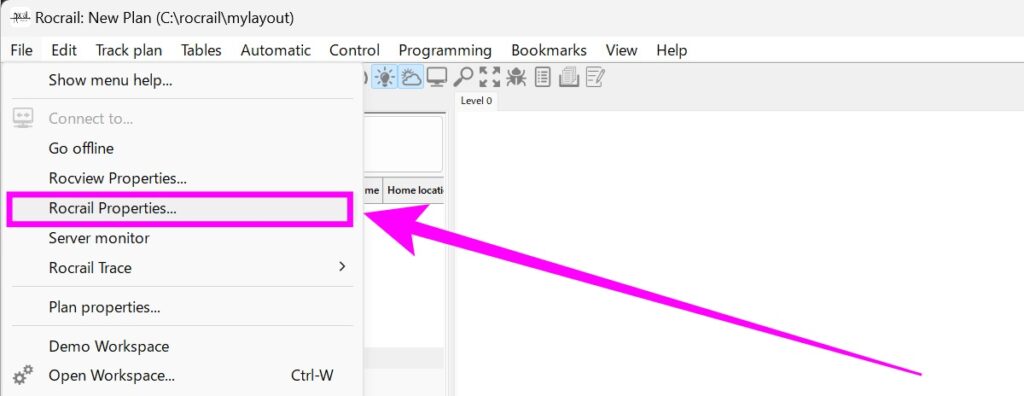
上部のメニューから「File」→「Rocrail properties…」を選択します。
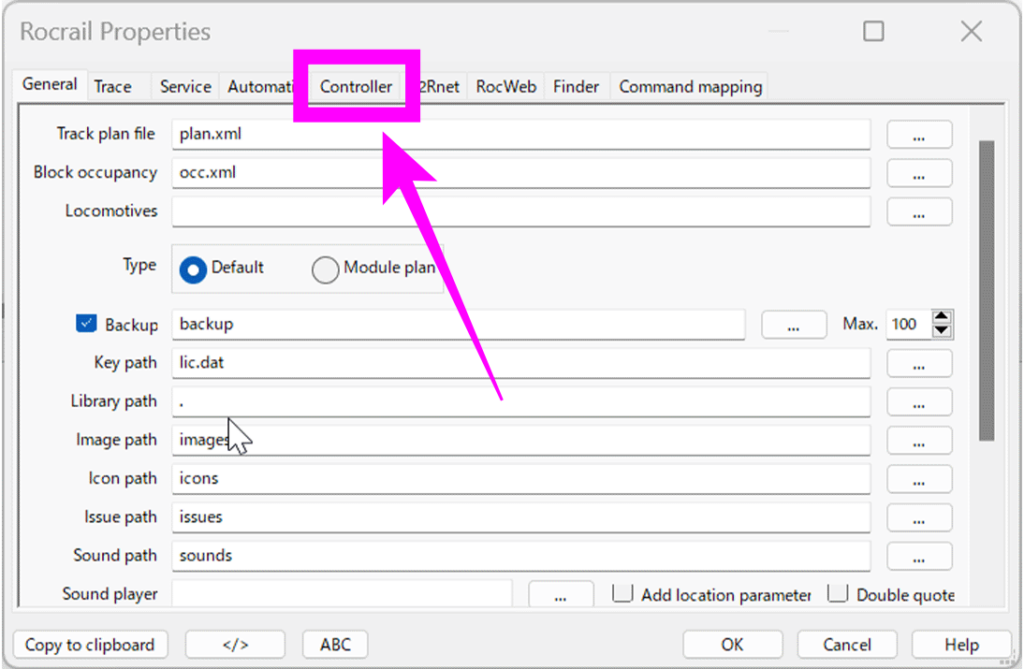
設定ウインドウが開きますので、「Controller」タブを選択します。
コントローラーの管理画面に切り替わります。
いまリストには「vcs-1」という仮想コントローラーが1つだけ登録されている状態になっています。
このコントローラーは削除しても問題はありませんが、テストにも使えるので、私は残しています。
この例では残したままで進めます。
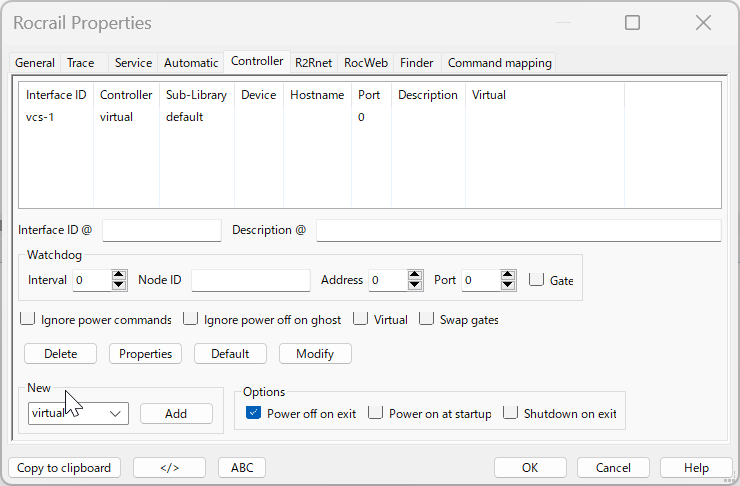
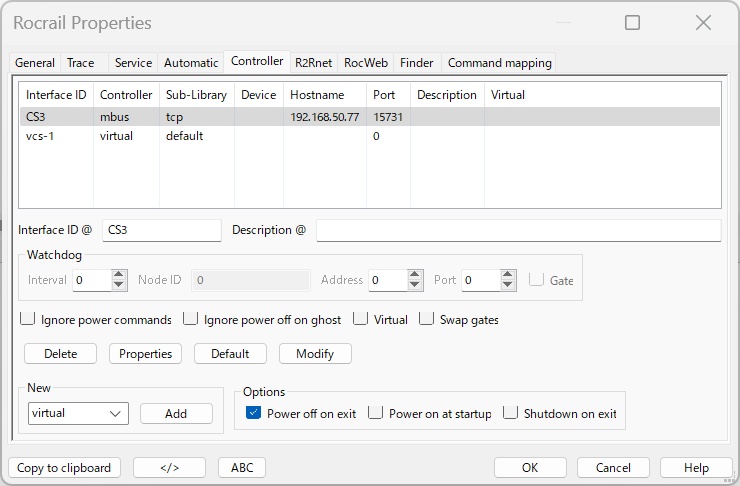
左下にある New 書かれている枠内の「virtual」と表示されている選択リストを開きます。
リストから、自分のレイアウトで使用するコマンドステーションを選択します。
メルクリンのCS2、CS3の場合は、「mbus」を選択してください。
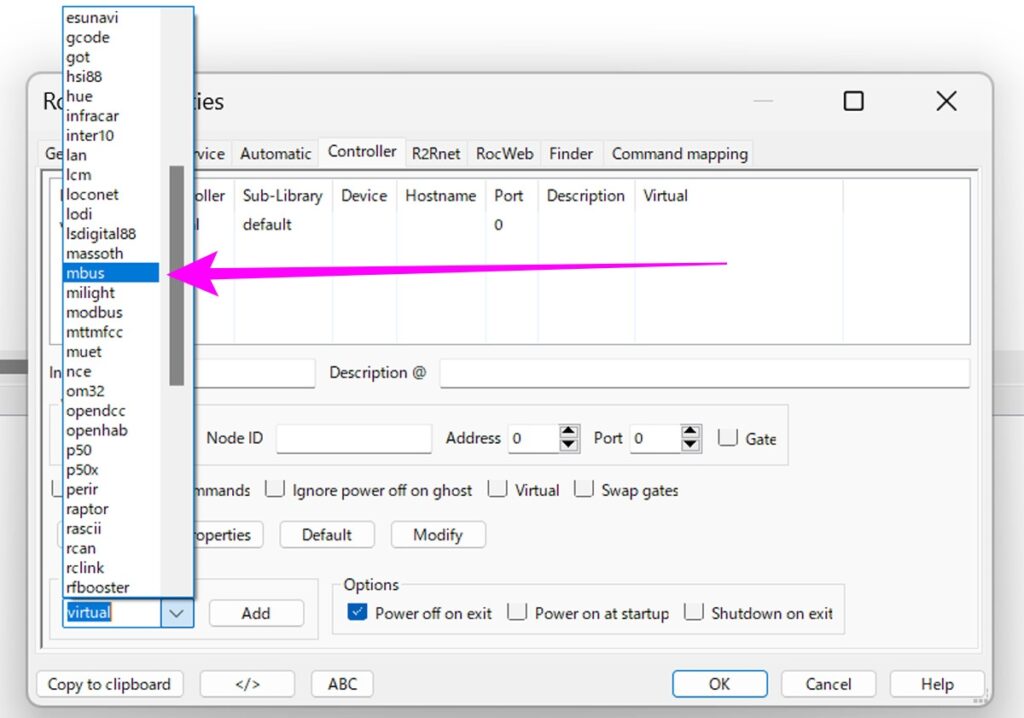
「Add」ボタンを押して追加すると、リストに「NEW」として「mbus」のコントローラーが追加されたと思います。
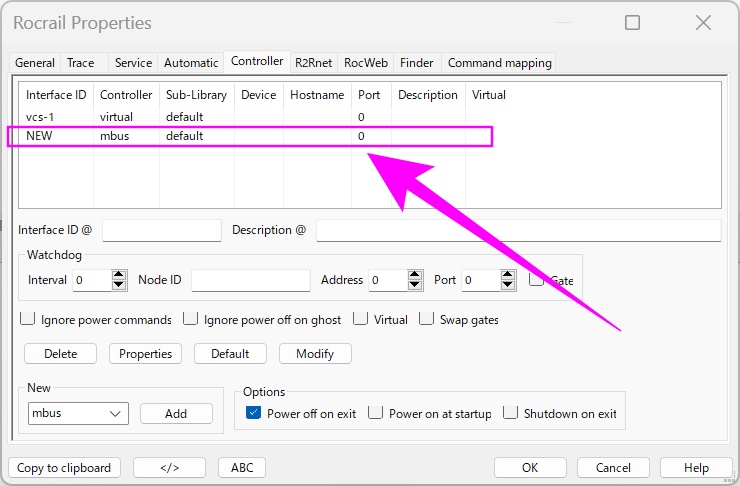
つづいて、いま登録した「NEW」の設定を行います。
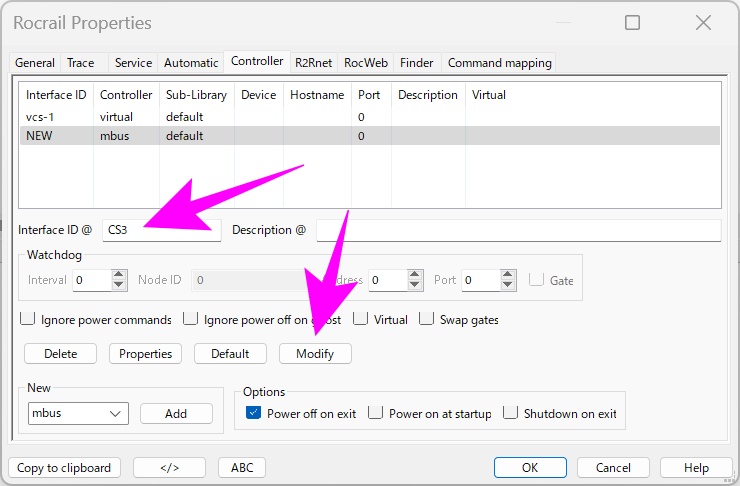
まず、名前が「NEW」ではわかりにくいので、何かわかりやすい名前を付けてください。
ここでは「CS3」という名前にします。
名前は、「Interface ID@」の欄を書き換えて「Modify」ボタンを押すと反映されます。
リストの名前(Interface ID)がCS3に書き換わりました。
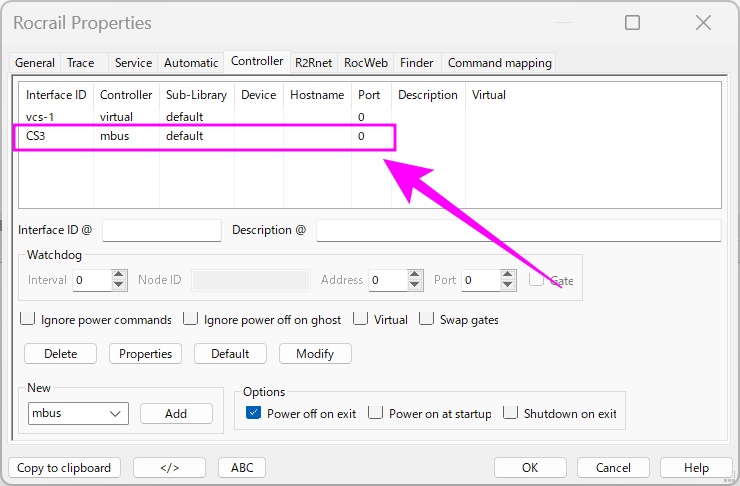
それでは、実際のCS3に接続します。
CS3が起動していて、ネットワークに接続されていることを確認してください。
まだの場合には、起動して、パソコンと同一のネットワークに接続してください。
リストの「CS3」を選択して、「Properties」ボタンを押します。
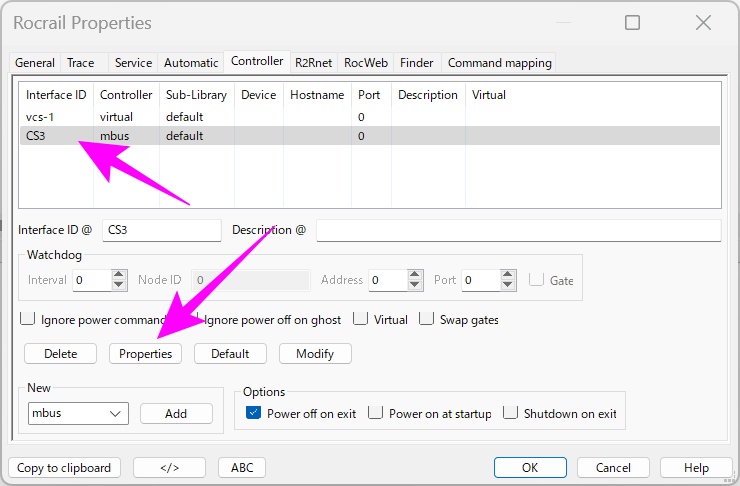
設定画面が表示されますので、下記のように設定してください。
Type: TCP
Hostname: CS3のIPアドレス : 15731
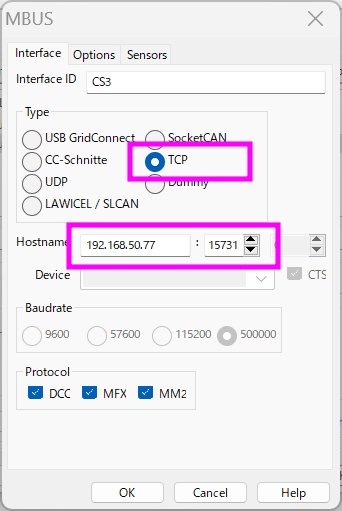
Hostnameは、ルーターで自分でCS3にホスト名を割り当てているのであれば、その名前も使用できます。
そうでない場合には、IPアドレスを入力してください。
CS3のIPアドレスは、CS3のシステム→IPで確認できます。
下記の例では、IPアドレスが「192.168.50.77」になっていますので、それを入力します。
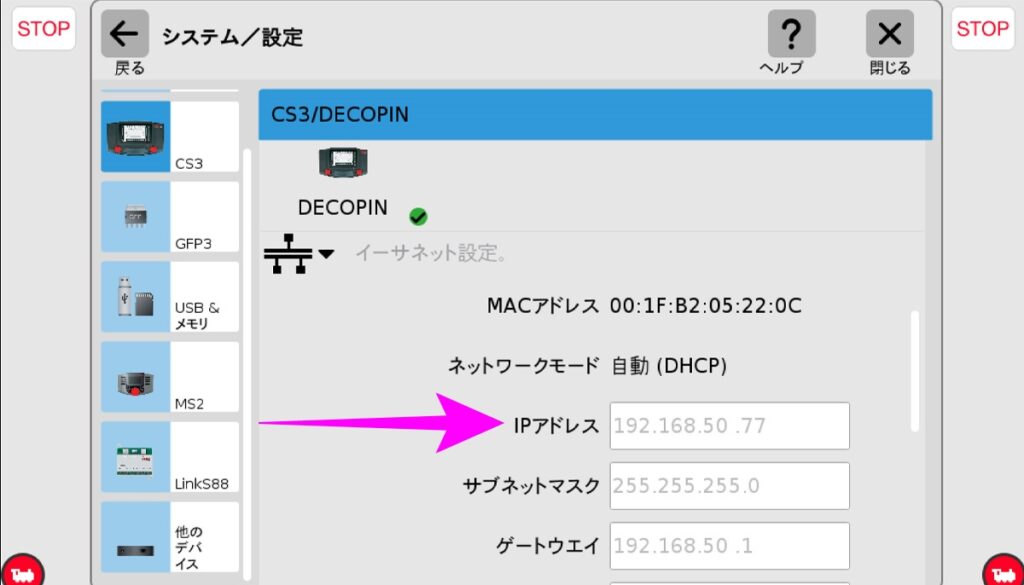
ネットワークモードが「自動(DHCP)」の場合には、CS3のIPアドレスは、毎回変わる可能性があります。
それでは、Rocrailで接続する時にも、毎回変更しなくてはならず面倒ですから、可能であれば、静的IPでアドレスを固定した方がいいかと思います。
設定したら「OK」ボタンで、コントローラー画面に戻ります。
設定が反映されていることを確認して、もう一度CS3を選択してから、「Default」ボタンを押して、CS3を初期値のコントローラーに設定します。
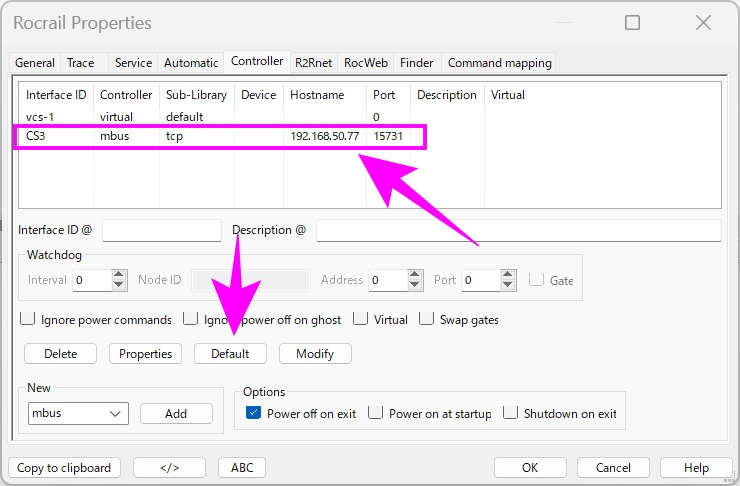
最終的に、このように、設定が反映されている「CS3」がリストの上に一番移動した状態になれば大丈夫です。
「OK」ボタンを押して、設定画面を閉じます。
★重要★
Rocrailアプリを再起動してください。
接続されているかテストしてみる
正しくCS3と接続されているかどうかを確認してみましょう。
Rocrailアプリを再起動して、再び「Open Workspace」から自分のレイアウトを選びます。
Rocviewの上部メニューから「Programming」→「CANBUS」を選択します。
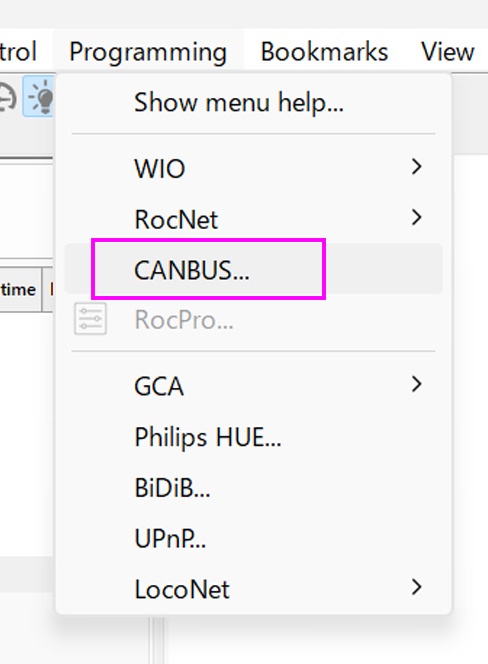
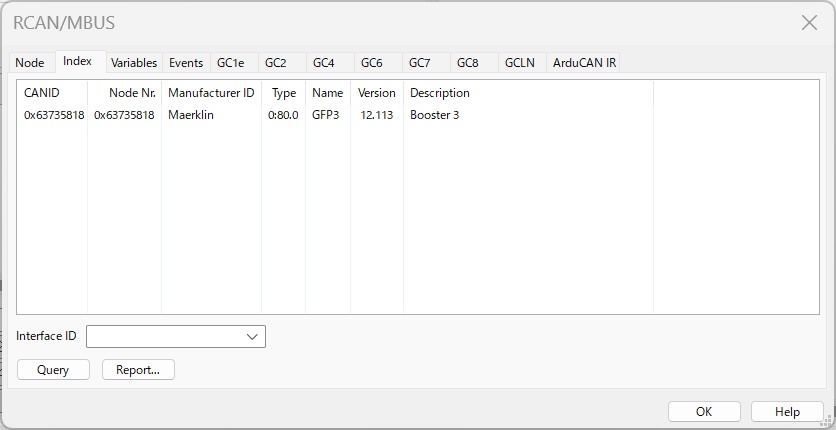
ウインドウが開きますので、そのまましばらく待ってください。
「Index」タブに、画面に下のように何かメルクリンの情報が表示されれば、正しく接続できています。
機関車を呼び出して運転してみる
CS3に登録されている機関車を呼び出して、Rocrailで運転してみましょう。
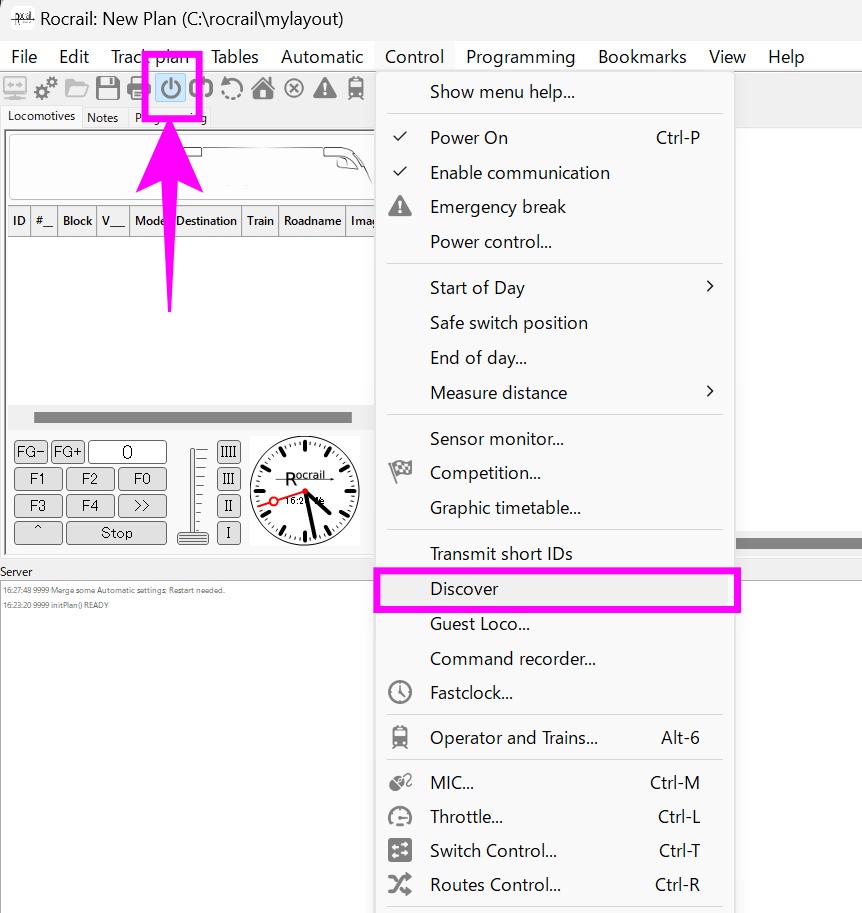
Rocviewの上部アイコンから、電源アイコンをタッチすると、CS3のSTOPが解除されて、GO状態になります。
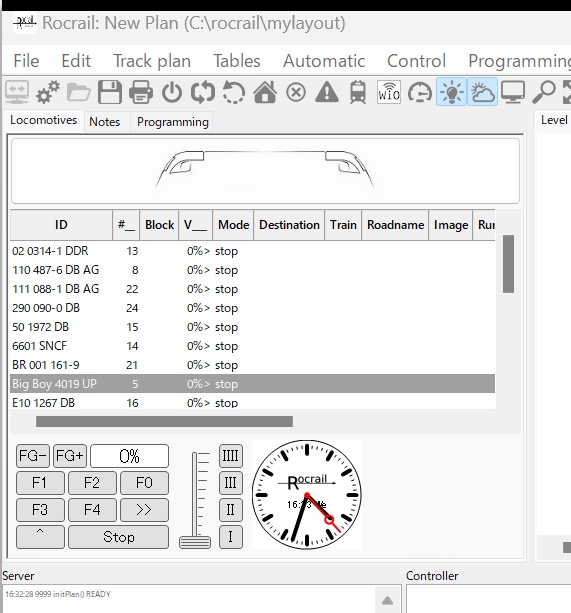
その状態で、「Control」→「Discover」と選択すると、CS3に登録されているすべての機関車が、左上のリストに次々と読み込まれて行きます。
試しに好きな機関車を選択してください。
機関車はリストの下のコントローラー(スロットル)で操作できます。
また、各機関車をダブルクリックすると、スロットルが別ウインドウとしてポップアップします。
これは何個でも並べられるので、たくさんの機関車のスロットルを全部表示しながら運転することもできます。
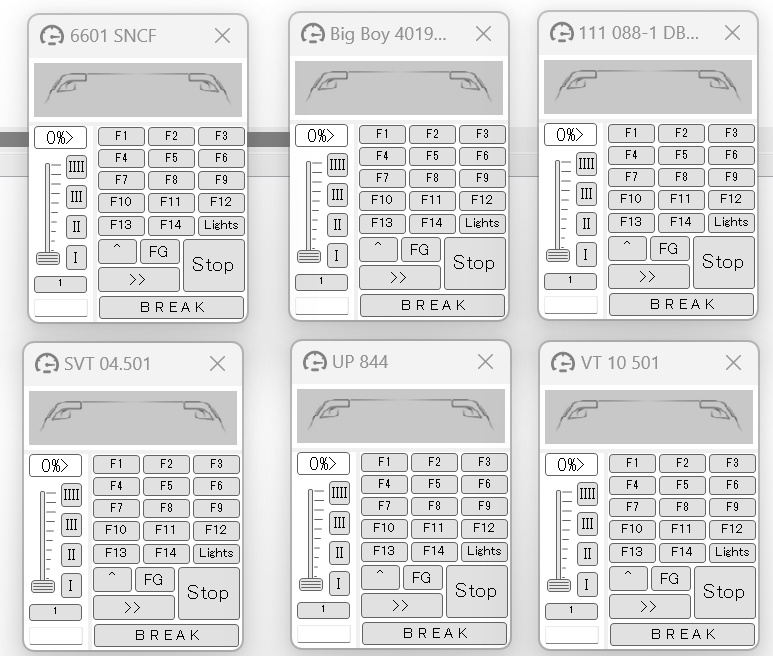
スロットルですが、メルクリンのCS3の機能とは、微妙に異なります。
まず速度指示レバーの右隣にある「I」~「IIII」のボタンは、定速走行ボタンです。
Iが最低速度、IIがミドル、IIIがクルーズで、IIIIが最高速度、として、ワンボタンで確実に一定速度で走るようになります。
CS2のシャトルトレイン機能を応用した定速走行のような感じで、非常に便利です。
各速度は、機関車ごとに設定で、好きな速度をセットしておくことが出来ます。
また、「STOP」は緊急停止ではありません。
減速遅延に従って滑らかに停車します。
緊急停止するには「BREAK」ボタンを押します。
ファンクションボタンはF14まで表示されていますが、F15以降は、FGボタンを押して切り替えます。
ファンクション名は、設定で自由なアイコン画像、または、テキストに変更できます。
日本語のテキストでも大丈夫です。
自動運転するには
今回はとりあえず、ここまでです。
自動運転をするにはレイアウト図を描いて、センサーや閉塞の設定を行います。
チュートリアルに従って進めていけば、ここから先は比較的簡単にできると思います。